

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280049C我也有一个疑问, 假设我们尝试以半额定扭矩运行电机、这意味着我们希望将电流增加到 50%、当达到命令电流时、电流波形的幅度将为 50%、但在启动误差将很高、因此我们将尝试利用最大总线幅值、使占空比在 0-100 之间变化、从而得到 Vdcbus 时平滑失真的 Sinusodiul 波形 峰峰值、但当我们达到我们命令的电流时、它将减小其占空比、从而使换向周期内的平均电压电源小于启动时的平均电压(通过在范围 20-70 内改变占空比或其他因素)、以便维持电流。 这到底是发生了什么,还是其他的事情?
对我的观察是正确的->
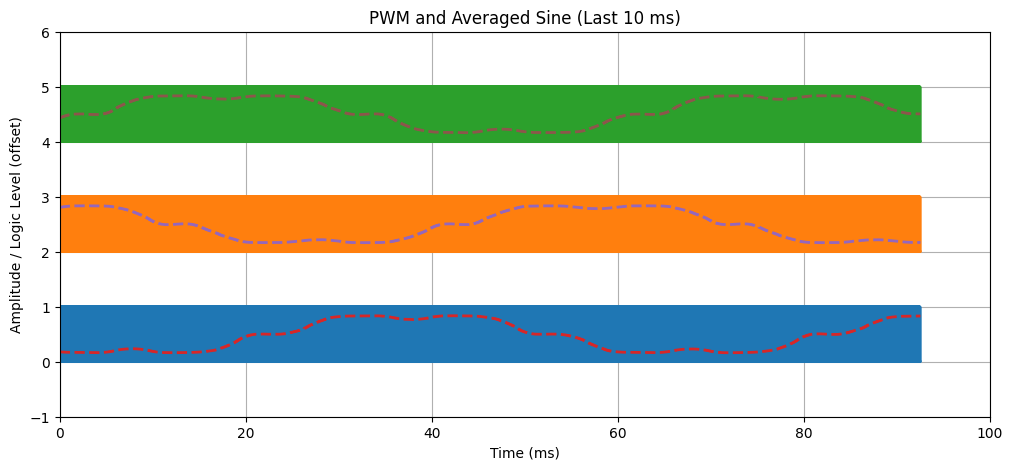
SVPWM 根据从 ipark 模块获得的输入来改变全部三个 PWM 的占空比、如果我们看到具有 120 *相位差的平均电压电源、则会得到正弦{MacDonald}形状波形。
在视频中、您可以看到正弦波形初始变化缓慢{即使在我只使具有 0.02 占空比的 PWM 彼此之间变化后、 实际上它比较慢}但随着时间的推移、它变得越来越快、原因是我们的 PWM 开关频率为 30kHz、但换向频率很低、因为它取决于电机转速和极点、在初始状态下、我们的电机处于静止状态、它正在加速、随着时间的推移、它会获得速度、我们的换向频率也会增加。
影响问题
它的快照 10ms、观察波形理论也表明、我们只能管理获取 MacDonald 形状波形、但它几乎是正弦波、三个波形都处于 120 相位差、波形缺陷可能是因为它在开环中运行、没有来自编码器的任何反馈。
。 


 更高的速度
更高的速度  这种情况。
这种情况。