请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F2.8069万F 你好
我想使用编码器运行感应式扭矩控制。
我已调整了Lab4a,以便做到这一点:
我已启动编码器手柄等
我还将编码器的读数传递给了mainISR功能中的控件
CTRL_RUN (ctrlHandle,halHandle,&gAdcData,&ENC_getElectro角(encHandle));
我已经执行了spruhF1中给出的所有步骤,但这一步(QEPctrl.h)除外
ANGLE_PU = EST_getAngle_PU (obj->estHandle);
//从ENC模块更新电气角度
ANGLE_PU = ENC_GETELEAngle (encHandle);
我没有修改此项,因为在Lab12实验室中,这些行不包括在内
这是否正确?
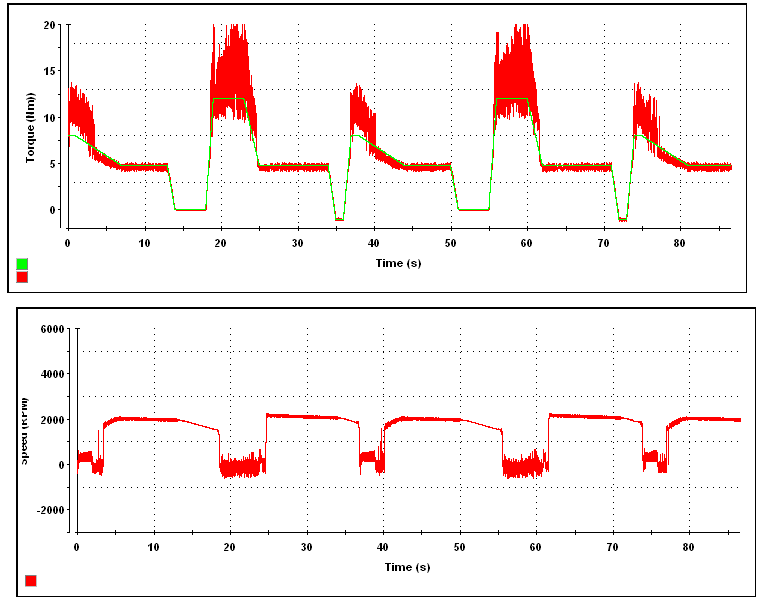
控制器工作正常,但似乎具有更多的扭矩纹波,而不带编码器的纹波(Lab4a)。 编码器分辨率为512 (我认为应该足够)
是否有任何遗漏?
我在上一篇文章中看到编码器固件不提供速度反馈。 是真的吗?
我还有另一个问题
由于我的应用(带轮式电机的动力传动系统),编码器对齐相位不适合实际应用。 我们提供了双增量和绝对编码器。 是否有执行偏移初始化的方法的示例? 我执行了一些多个编码器校准过程(在Rs重新计算步骤中),根据电机初始位置(在Rs重新校准步骤之前),我们获得了四个位置:1591,1079,567,55 (电机有4个极对,我们使用2048 ABS封装器)。 根据测试,这些位置的缩写为+/-50。 我的想法是使用这个预先计算的位置来设置偏移。 这种缩写是否对执行此操作至关重要? 是否有将这些点转换为有效偏移的方式的示例
感谢你
Borja Gómez ć