

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F2.8379万D 工具/软件:Code Composer Studio
大家好,
我正在Code Composer Studio软件环境中的两个微控制器之间进行基于CAN的消息传输。 通信接口的方框图结构如下所示:
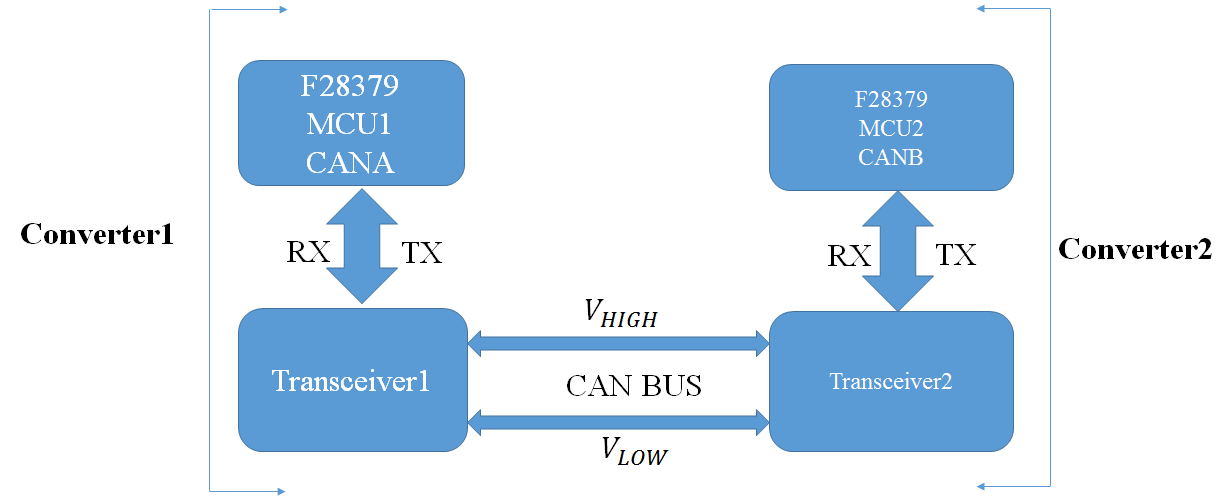
根据上图,需要通过编程开发的应用程序包括以下几个步骤:
在转换器2 (直流-交流3相逆变器)中发生故障时,
(A) MCU2必须 检测Conv2中的故障。
(B) MCU2必须将故障状态告知MCU1。
(c)因此,MCU1将向CONV1生成门控信号 ,以便将直流链路电压降至零。
(D)最后 ,Conv2的输入电压将为零,因此同样会停止工作并为负载提供3相输出功率。
如果有人建议为上述情况进行编程,我将非常有义务。
谢谢你。
此致
Sumanta
