

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:LAUNCHTXL-F2.8069万M 主题中讨论的其他部件:BOOSTXL-DRV8301
BOOSTXL-DRV8301使用低侧电流并联电阻器进行电流反馈,根据我计划使用的参考设计,根据电动机的THR相位连接,在并联上生成电流反馈,我是否必须修改设计,还是这是可用的替代方案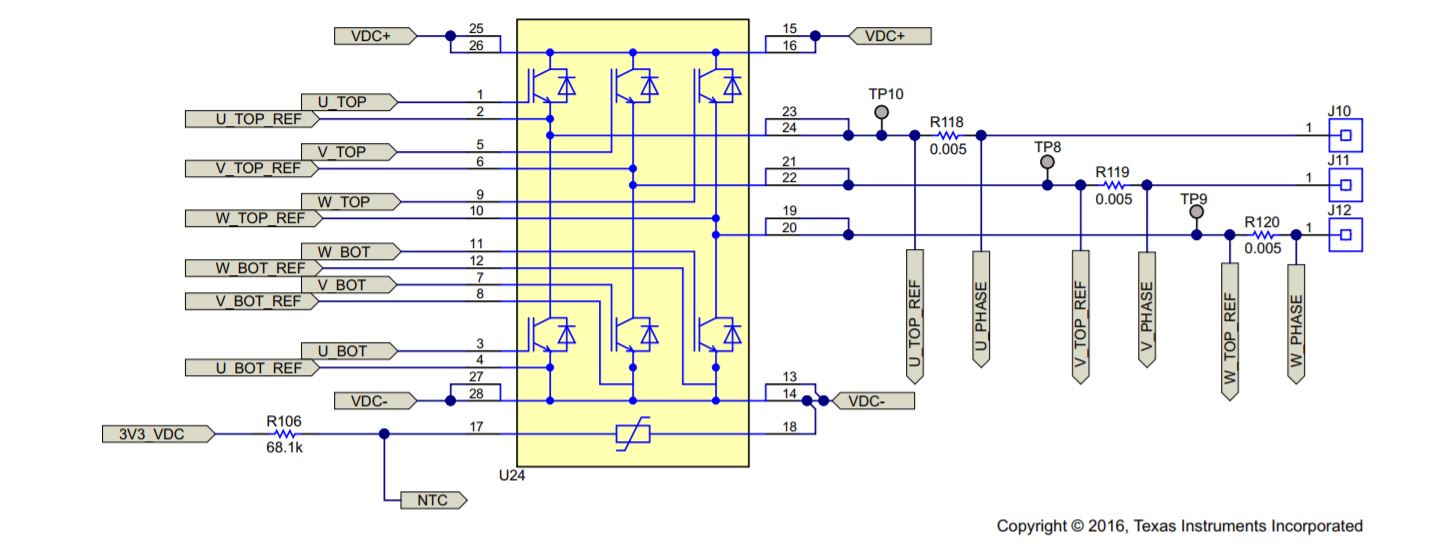
BOOSTXL-DRV8301使用低侧电流并联电阻器进行电流反馈,根据我计划使用的参考设计,根据电动机的THR相位连接,在并联上生成电流反馈,我是否必须修改设计,还是这是可用的替代方案
