主题中讨论的其他部件:controlSUITE, C2000WARE
工具/软件:Code Composer Studio
您好,
最近我在Launchpad_XL上从事一个F2.8069万M微控制器的项目,现在我几乎完成了这个项目,我想在微控制器内闪存整个代码,那一刻我意识到我正面临一个超级复杂的问题! (至少我在论坛和文档中看到的内容,以及经过20个小时的工作,几乎没有找到解决方案后看到的内容)。
让我们从问题开始:
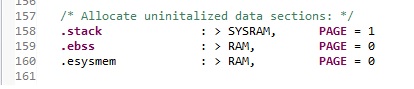
我编写了一个应用程序,它可以在某些线圈上保持电流固定,我使用DCL库中的PI控制器和F2.8069万的许多其他功能。 当我在RAM模式下通过调试器运行代码时,一切正常,我可以控制系统。 要将代码从RAM移动到闪存(或者更具技术 意义的是在 启动开始时将代码从闪存加载到RAM),我阅读了“spA 958 l ”,然后我看了示例代码, 但我遇到的问题是,我的代码在某些点被非法 ISR卡住,或者在进入功能时无法返回。 (我已根据ControlSuit中的闪存示例代码修改了链接程序文件)。
首先,我想知道如何在代码编写器中验证我是否正在将正确的内存部件/功能分配给RAM或闪存(在其中一个ControlSuit示例中推荐使用SDFlash实用程序,但它缺乏文档并且极其复杂)
其次,这是我的代码的一些部分:
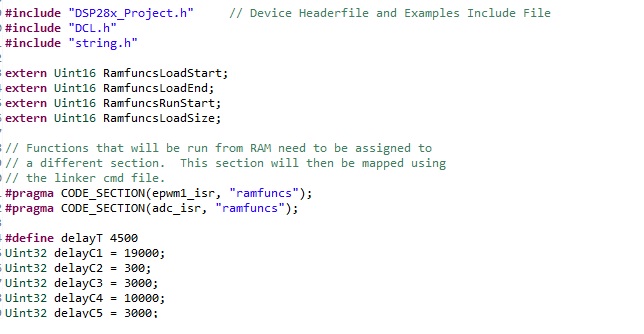
在主程序中,在时钟初始化后,我有这部分代码用于复制存储器:

代码达到以下位置:
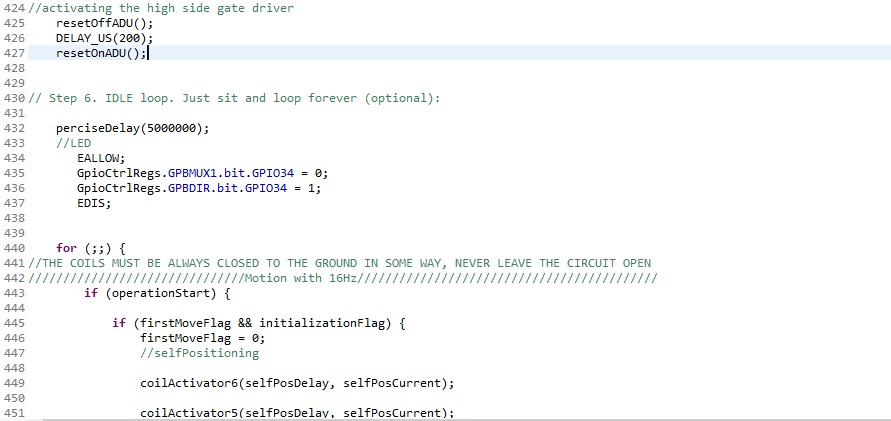
我可以将代码运行到“resetOffADU();”函数,然后代码进入非法ISR,当我评论此函数时,仍然在永远循环中,我再次陷入其他函数的计时等
"resetOffADU():"函数只是简单的GPIO引脚设置。

这些也是 我收到的一些可疑警告:

这是我第一次遇到德州微控制器的问题,它非常复杂,而且没有适当和可靠的文档,如果 你能引导我找到解决方案,我将不胜感激。