请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
尊敬的先生/女士:
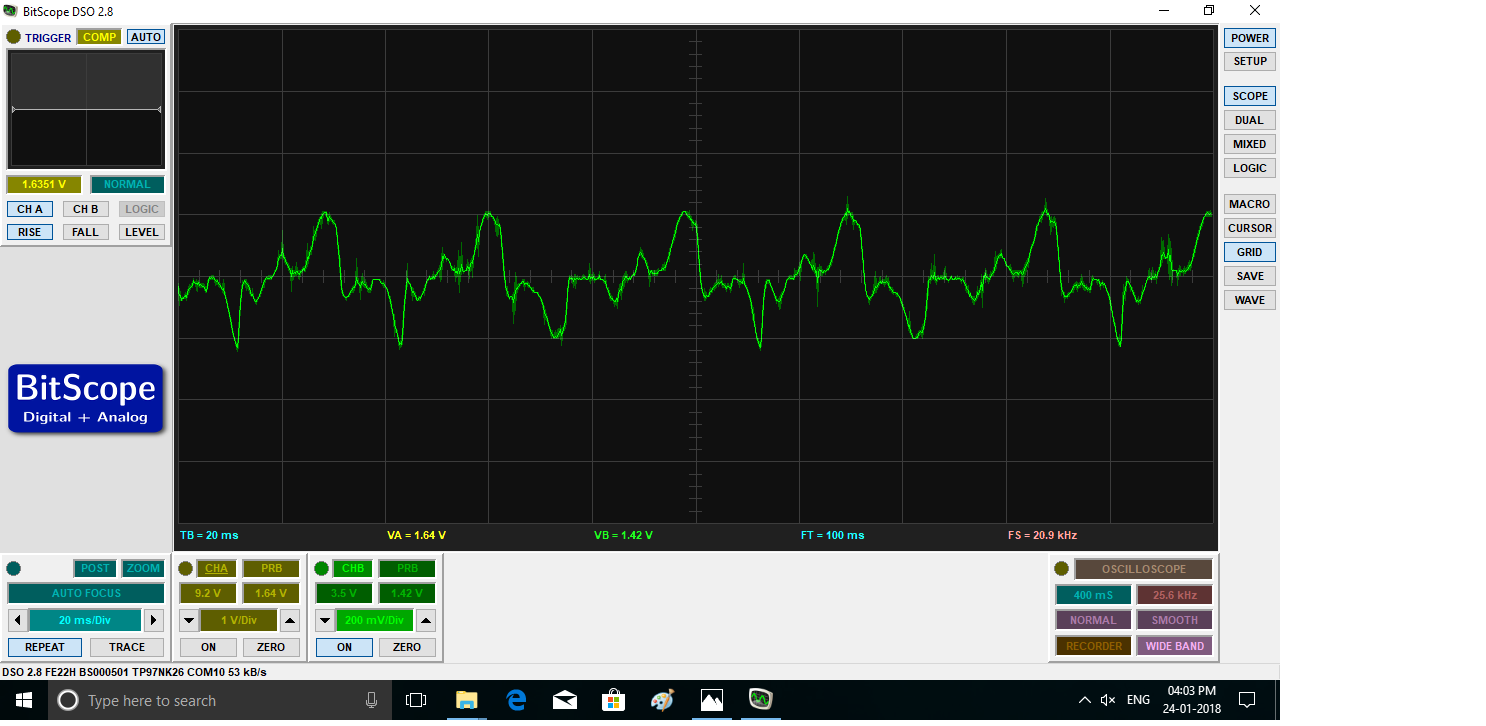
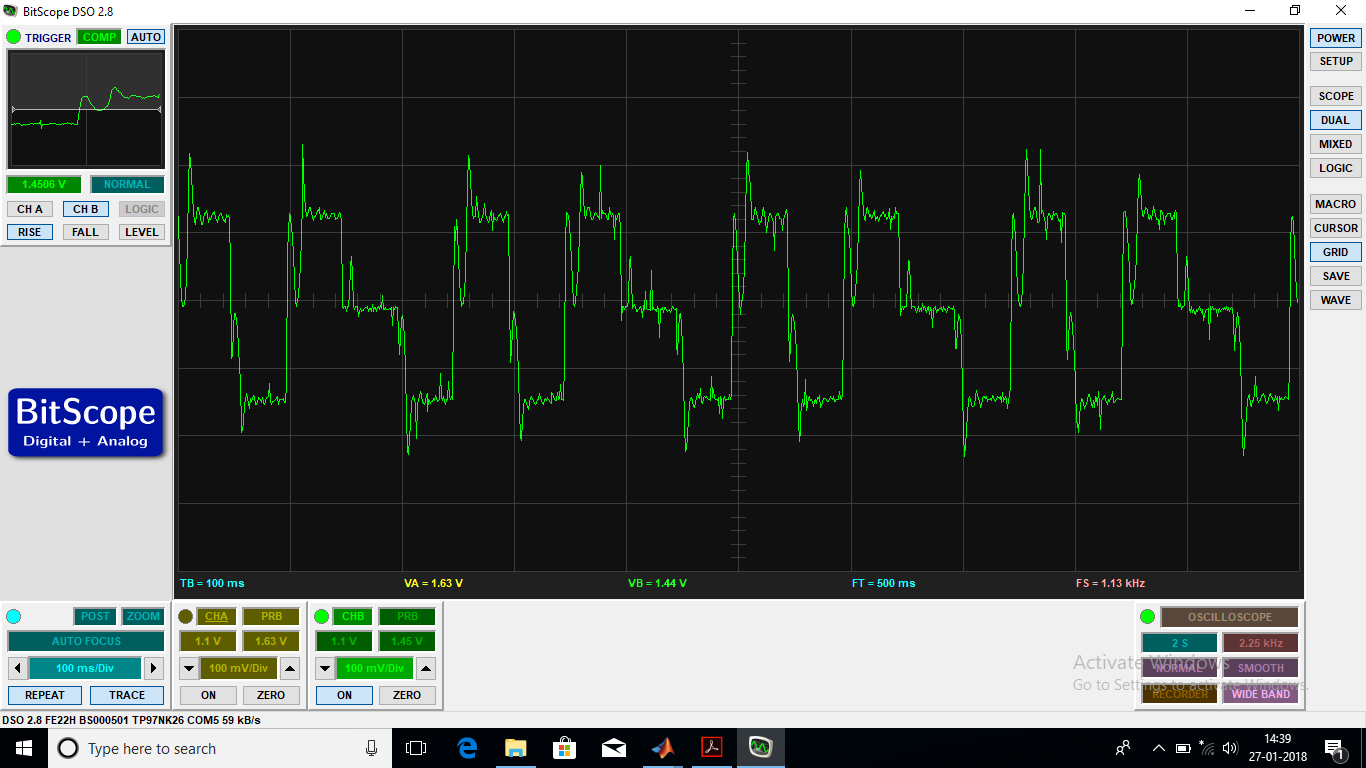
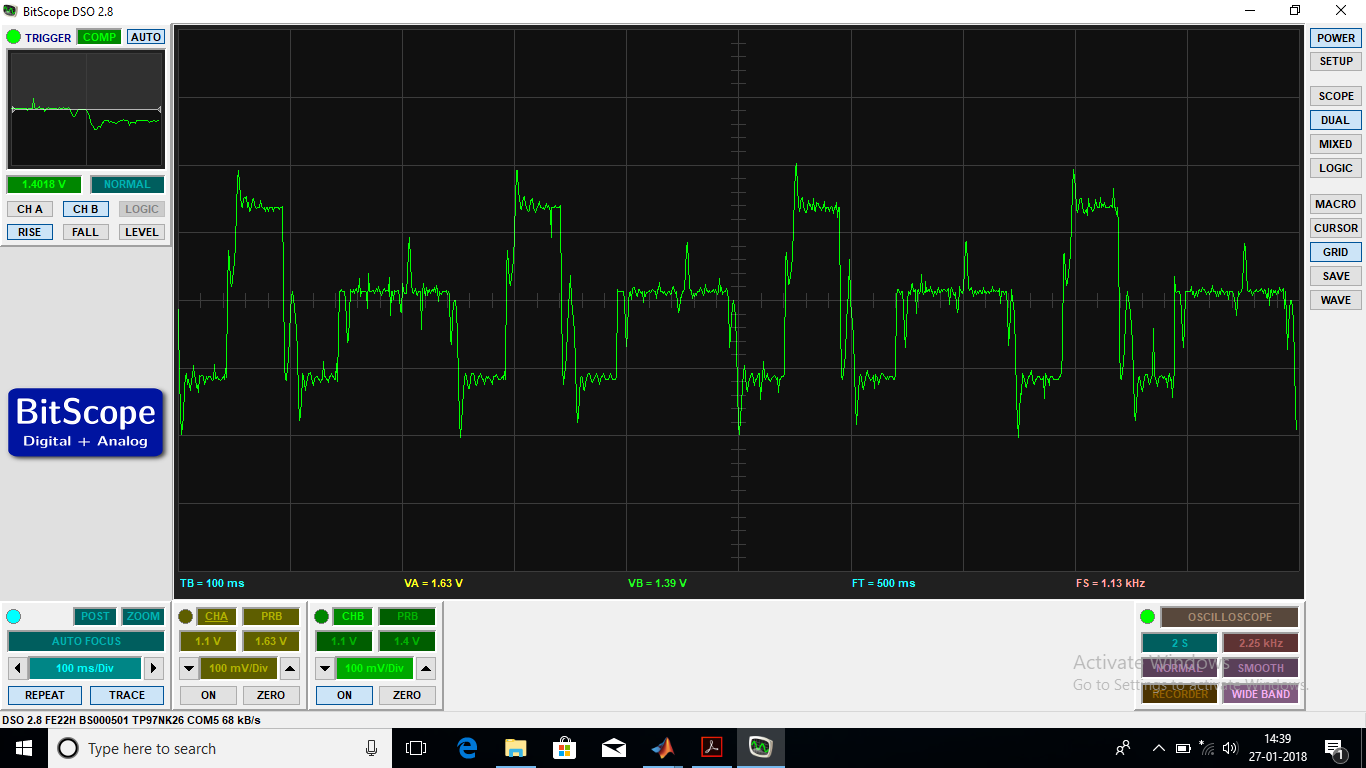
我对控制BLDC电动机有一些疑问,当电动机以6步换向顺序使用霍尔传感器作为反馈时,相电流形状应该是准方波。
在模拟时,Matlab波形中的BLDC电机逻辑正在正确生成,但在Realtime硬件中,波形的形状不正确。
我也尝试了低速,当时每次都缺少一个换向步进信号。当前波形连接到此线程。
高速时,它会在电流传感器(ACS712)上生成更多的峰值。
我正在使用tms320c2.8069万微控制器。
此致,
Krishna kanth。