请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F2.8069万M 大家好。
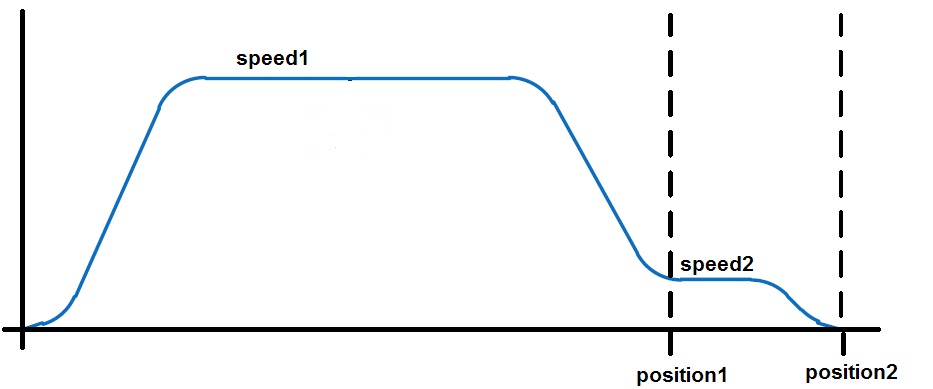
我是InstaSpin和TI工具链的新用户。我正在试用instaSpin Motion实验室,并且还阅读了Instaspin文档。 我也搜索过论坛,但未找到答案。 有人能向我描述一下位置控制Vel-典型值和速度控制之间的区别吗? 我了解位置控制POS_Typ和速度控制模式的作用,但无法在功能方面区分Pos控制VEL_TYP和速度控制。
如果有任何明确的实际解释,我将不胜感激。
谢谢!
MOMA