

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28.0049万C-Q1 您好,
我 正在 使用带霍尔效应传感器的PMSM电机控制。
我使用FOC算法来进行速度回路和电流回路。
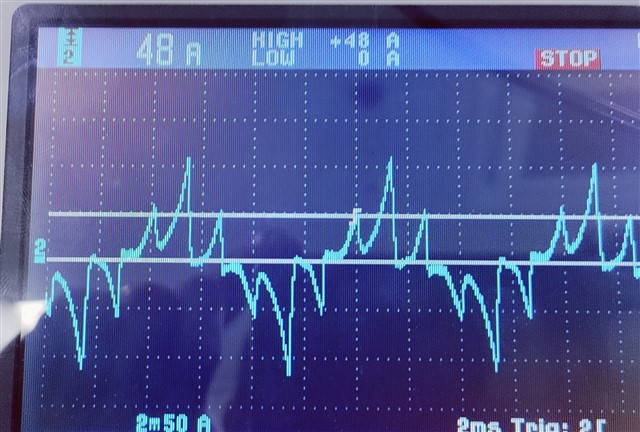
我得到的是非正弦输出电流波形,它应该是正弦波形。
哪个因素导致了此非正弦电流。
PWM频率- 20kHz
ISR为- 50用户。
{
读取霍尔效应传感器()
克拉克()
公园()
慢速循环(PI)
扭矩(PI)
ID (PI)
反向驻车()
svpwm()
读取速度()
}
请帮助我解决此问题
此致,
