请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F2.8335万 您好E2E:
请帮助我们的客户解决TMS320F2.8335万 GPIO遇到的问题,以下是完整的查询:
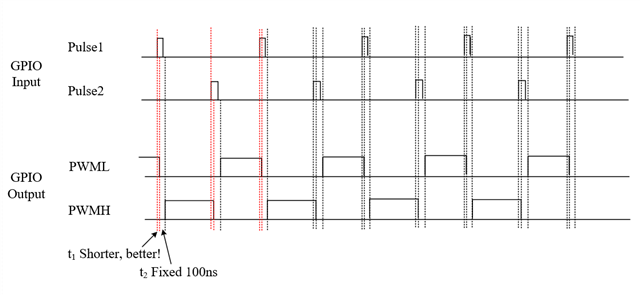
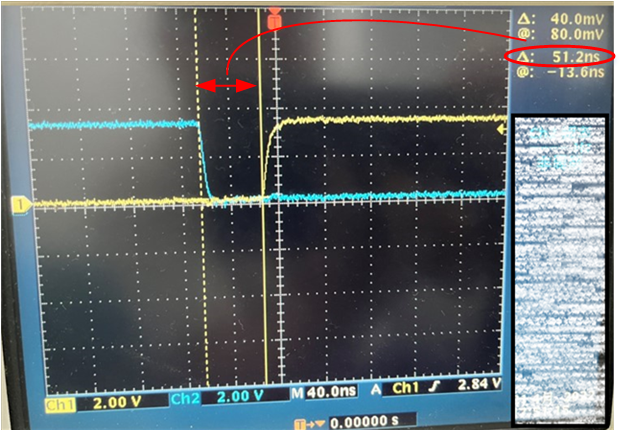
最近,我发现GPIO延迟出现意外情况。 例如 ,当我尝试按如下所示顺序更改两个GPIO输出时,两个GPIO之间将有50ns延迟,这可从示波器中观察到。 (注:系统时钟为150m,因此系统周期约为8.3ns)为什么设置或清除GPIO需要这么多系统时钟?
GpioDataRegs.GPACLEAR.bit.GPIO4 = 1;
GpioDataRegs.GPASET.bit.GPIO5 = 1;
此外,当我编写代码时,例如:
同时(!GpioDataRegs.GPADAT.bit.GPIO2);
GpioDataRegs.GPACLEAR.bit.GPIO4 = 1;
从 GPIO2输入到 GPIO4输出将有150ns延迟,这完全超出我的预期。
请帮我解决这两个问题吗?
此致,
卡洛