主题中讨论的其他器件:C2000WARE、 C2000WARE-MOTORCONTROL-SDK
大家好、
https://e2e.ti.com/support/microcontrollers/c2000-microcontrollers-group/c2000/f/c2000-microcontrollers-forum/1081923/tmdshvmtrinspin-starting-jerk
上面的链接是我之前的主题、请检查一次。
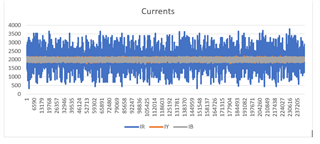
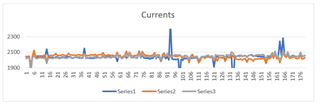
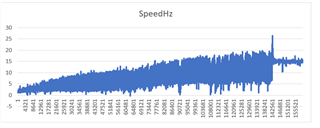
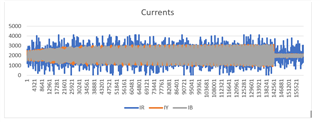
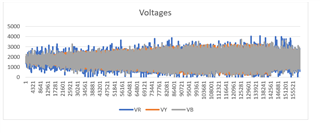
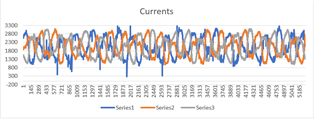
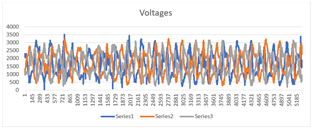
我们如何控制电机的启动电流、因为我们的电机绕组被烧坏了这种高启动电流。
我的电机在启动时发出很大的噪声。
有人能帮我解决这个问题吗?
以下是我的电机参数
#if (USER_MOTOR== Estun_EMJ_04APB22_A)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (20)
#define USER_MOTOR_RR_Ohm (0.0)
#define USER_MOTOR_Rs_Ohm (2.25093718)
#define USER_MOTOR_LS_D_H (0.033496008015)
#define USER_MOTOR_LS_q_H (0.033496008015)
#define USER_MOTOR_RAGE_VLUX_VpHz (4.8)
#define USER_MOTOR_磁 化电流_A (空)
#define USER_MOTOR_RES_EST_CURRENT_A (1.5)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.5)
#define USER_MOTOR_MAX_CURRENT_A (15.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (2500.0)
#define USER_MOTOR_INERING_Kgm2 (3.10002e-02)
#define USER_MOTOR_FREQ_MIN_Hz (5.0)// Hz
#define USER_MOTOR_FREQ_MAX_Hz (48.0)// Hz 额定值的120%//从30增加到48
#define USER_MOTOR_FREQ_LOW_Hz (4.0)// Hz //从2.5增加到4
#define USER_MOTOR_FREQ_HIGH_Hz (40.0)// Hz //增加到40 ffrom 25
#define USER_MOTOR_VOLT_MIN_V (45.0)//电压
#define USER_MOTOR_VOLT_MAX_V (300.0)//电压