请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28384D 尊敬的团队:
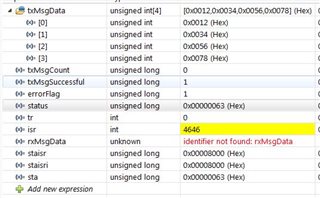
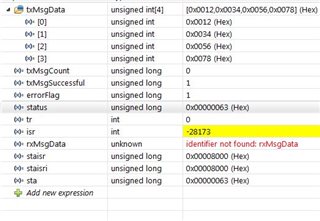
我正在控制器中运行上述程序。接收操作正常工作、当我尝试将其用作发送时、其错误标志为1、传输未发生。
CAN_Get 状态值 为0x00000063。我已附加代码和表达式映像。请就此提供帮助。! 有时可变 ISR 变为负。
提前感谢!
//#############################################################################
//
// FILE: can_ex5_transmit_receive.c
//
// TITLE: CAN Configuration for Transmit and Receive.
//
//! \addtogroup driver_example_list
//! <h1> CAN Transmit and Receive Configurations </h1>
//!
//! This example shows the basic setup of CAN in order to transmit or receive
//! messages on the CAN bus with a specific Message ID. The CAN Controller is
//! configured according to the selection of the define.
//!
//! When the TRANSMIT define is selected, the CAN Controller acts as a
//! Transmitter and sends data to the second CAN Controller connected
//! externally.If TRANMSIT is not defined the CAN Controller acts as a Receiver
//! and waits for message to be transmitted by the External CAN Controller.
//! Please refer to the appnote Programming Examples and Debug Strategies
//! for the DCAN Module (www.ti.com/lit/SPRACE5) for useful information
//! about this example
//!
//! \note CAN modules on the device need to be connected to via CAN
//! transceivers.
//!
//! \b Hardware \b Required \n
//! - A C2000 board with CAN transceiver.
//!
//! \b External \b Connections \n
//! - ControlCARD CANA is on DEVICE_GPIO_PIN_CANTXA (CANTXA)
//! - and DEVICE_GPIO_PIN_CANRXA (CANRXA)
//!
//! \b Watch \b Variables \b Transmit \Configuration \n
//! - MSGCOUNT - Adjust to set the number of messages
//! - txMsgCount - A counter for the number of messages sent
//! - txMsgData - An array with the data being sent
//! - errorFlag - A flag that indicates an error has occurred
//! - rxMsgCount - Has the initial value as No. of Messages to be received
//! and decrements with each message.
//!
//
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
//
// Comment to Make the CAN Controller work as a Receiver.
//
#define TRANSMIT
//
// Defines
//
#ifdef TRANSMIT
#define TX_MSG_OBJ_ID 1
#else
#define RX_MSG_OBJ_ID 1
#endif
#define MSG_DATA_LENGTH 4
#define MSGCOUNT 10
//#include "canstr.h"
//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
/*
#define IPC_CMD_READ_MEM 0x1001
#define IPC_CMD_RESP 0x2001
#define TEST_PASS 0x5555
#define TEST_FAIL 0xAAAA
*/
#define PACKET_LENGTH 10
#pragma DATA_SECTION(packetData, "MSGRAM_CPU_TO_CM")
uint8_t packetData[PACKET_LENGTH];
uint32_t pass;
uint32_t readData[10];
uint32_t status;
uint8_t MsgCnt;
int tr;
int isr;
unsigned long staisr;
unsigned long staisri;
unsigned long sta;
//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
//
// Globals
//
#ifdef TRANSMIT
volatile uint32_t txMsgCount = 0;
uint32_t txMsgSuccessful = 1;
uint16_t txMsgData[4];
#else
volatile uint32_t rxMsgCount = MSGCOUNT;
uint16_t rxMsgData[8];
#endif
volatile unsigned long i;
volatile uint32_t errorFlag = 0;
//!!!!!!!!!!!!!!!!!!!!!!!!!!
IPC_MessageQueue_t messageQueue;
IPC_Message_t TxMsg, RxMsg;
uint8_t TX;
//!!!!!!!!!!!!!!!!!!!!!!!!
//
// Function Prototypes
//
__interrupt void canaISR(void);
//
// Main
//
void main(void)
{
// Initialize device clock and peripherals
//
Device_init();
//
// Initialize GPIO and configure GPIO pins for CANTX/CANRX
// on module A.
//
Device_initGPIO();
GPIO_setPinConfig(DEVICE_GPIO_CFG_CANRXA);
GPIO_setPinConfig(DEVICE_GPIO_CFG_CANTXA);
/////////////////////////////////////////////
/////////////////////////////////////////////
//
// Allocated shared peripheral to C28x
//
SysCtl_allocateSharedPeripheral(SYSCTL_PALLOCATE_CAN_A,0x0U);
SysCtl_allocateSharedPeripheral(SYSCTL_PALLOCATE_CAN_B,0x0U);
//
// Initialize the CAN controllers
//
CAN_initModule(CANA_BASE);
//
// Set up the CAN bus bit rate to 500kHz for each module
// Refer to the Driver Library User Guide for information on how to set
// tighter timing control. Additionally, consult the device data sheet
// for more information about the CAN module clocking.
//
CAN_setBitRate(CANA_BASE, DEVICE_SYSCLK_FREQ, 500000, 20);
//
// Enable interrupts on the CAN A peripheral.
//
CAN_enableInterrupt (CANA_BASE, CAN_INT_IE0 | CAN_INT_ERROR |
CAN_INT_STATUS);
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
// This registers the interrupt handler in PIE vector table.
//
Interrupt_register(INT_CANA0,&canaISR);
//
// Enable the CAN-A interrupt signal
//
Interrupt_enable(INT_CANA0);
CAN_enableGlobalInterrupt(CANA_BASE, CAN_GLOBAL_INT_CANINT0);
#ifdef TRANSMIT
//
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// CAN Module: A
// Message Object ID Number: 1
// Message Identifier: 0x15555555
// Message Frame: Extended
// Message Type: Transmit
// Message ID Mask: 0x0
// Message Object Flags: None
// Message Data Length: 4 Bytes
//
CAN_setupMessageObject(CANA_BASE, TX_MSG_OBJ_ID, 0x00000001, //0x15555555
CAN_MSG_FRAME_STD, CAN_MSG_OBJ_TYPE_TX, 0, //EXT
CAN_MSG_OBJ_TX_INT_ENABLE, MSG_DATA_LENGTH);
//
// Initialize the transmit message object data buffer to be sent
//
txMsgData[0] = 0x12;
txMsgData[1] = 0x34;
txMsgData[2] = 0x56;
txMsgData[3] = 0x78;
#else
//
// Initialize the receive message object used for receiving CAN messages.
// Message Object Parameters:
// CAN Module: A
// Message Object ID Number: 1
// Message Identifier: 0x15555555
// Message Frame: Extended
// Message Type: Receive
// Message ID Mask: 0x0
// Message Object Flags: Receive Interrupt
// Message Data Length: 4 Bytes (Note that DLC field is a "don't care"
// for a Receive mailbox
//
CAN_setupMessageObject(CANA_BASE, RX_MSG_OBJ_ID, 0x15555555,
CAN_MSG_FRAME_EXT, CAN_MSG_OBJ_TYPE_RX, 0,
CAN_MSG_OBJ_RX_INT_ENABLE, MSG_DATA_LENGTH);
#endif
//
// Start CAN module A operations
//
CAN_startModule(CANA_BASE);
#ifdef TRANSMIT
//
// Transmit messages from CAN-A.
//
for(i = 0; i < MSGCOUNT; i++)
{
//
// Check the error flag to see if errors occurred
//
if(errorFlag)
{
asm(" ESTOP0");
}
//
// Transmit the message.
//
CAN_sendMessage(CANA_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH,
txMsgData);
//
// Delay 0.25 second before continuing
//
DEVICE_DELAY_US(250000);
while(txMsgSuccessful);
//
// Increment the value in the transmitted message data.
//
txMsgData[0] += 0x01;
txMsgData[1] += 0x01;
txMsgData[2] += 0x01;
txMsgData[3] += 0x01;
//
// Reset data if exceeds a byte
//
if(txMsgData[0] > 0xFF)
{
txMsgData[0] = 0;
}
if(txMsgData[1] > 0xFF)
{
txMsgData[1] = 0;
}
if(txMsgData[2] > 0xFF)
{
txMsgData[2] = 0;
}
if(txMsgData[3] > 0xFF)
{
txMsgData[3] = 0;
}
//
// Update the flag for next message.
//
txMsgSuccessful = 1;
}
#else
//
// Loop to keep receiving data from another CAN Controller.
//
while(rxMsgCount)
{
MsgCnt++;
}
#endif
//
// Stop application after completion.
//
asm(" ESTOP0");
}
//
// CAN A ISR - The interrupt service routine called when a CAN interrupt is
// triggered on CAN module A.
//
__interrupt void
canaISR(void)
{
isr++;
//
// Read the CAN-B interrupt status to find the cause of the interrupt
//
status = CAN_getInterruptCause(CANA_BASE);
staisr = status;
//
// If the cause is a controller status interrupt, then get the status
//
if(status == CAN_INT_INT0ID_STATUS)
{
staisri=status;
//
// Read the controller status. This will return a field of status
// error bits that can indicate various errors. Error processing
// is not done in this example for simplicity. Refer to the
// API documentation for details about the error status bits.
// The act of reading this status will clear the interrupt.
//
status = CAN_getStatus(CANA_BASE);
sta=status;
//
// Check to see if an error occurred.
//
#ifdef TRANSMIT
if(((status & ~(CAN_STATUS_TXOK)) != CAN_STATUS_LEC_MSK) &&
((status & ~(CAN_STATUS_TXOK)) != CAN_STATUS_LEC_NONE))
#else
if(((status & ~(CAN_STATUS_RXOK)) != CAN_STATUS_LEC_MSK) &&
((status & ~(CAN_STATUS_RXOK)) != CAN_STATUS_LEC_NONE))
#endif
{
//
// Set a flag to indicate some errors may have occurred.
//
errorFlag = 1;
}
}
#ifdef TRANSMIT
else if(status == TX_MSG_OBJ_ID) //else
{
tr++;
//
// Getting to this point means that the TX interrupt occurred on
// message object 1, and the message TX is complete. Clear the
// message object interrupt.
//
CAN_clearInterruptStatus(CANA_BASE, TX_MSG_OBJ_ID);
//
// Increment a counter to keep track of how many messages have been
// transmitted. In a real application this could be used to set flags to
// indicate when a message is transmitted.
//
txMsgCount++;
//
// Since the message was transmitted, clear any error flags.
//
errorFlag = 0;
//
// Clear the message transmitted successful Flag.
//
txMsgSuccessful = 0;//0
}
#else
else if(status == RX_MSG_OBJ_ID)
{
//
// Get the received message
//
CAN_readMessage(CANA_BASE, RX_MSG_OBJ_ID, rxMsgData);
//
// Getting to this point means that the RX interrupt occurred on
// message object 1, and the message RX is complete. Clear the
// message object interrupt.
//
CAN_clearInterruptStatus(CANA_BASE, RX_MSG_OBJ_ID);
//
// Decrement the counter after a message has been received.
//
rxMsgCount--;
//
// Since the message was received, clear any error flags.
//
errorFlag = 0;
}
#endif
//
// If something unexpected caused the interrupt, this would handle it.
//
else
{
//
// Spurious interrupt handling can go here.
//
}
//
// Clear the global interrupt flag for the CAN interrupt line
//
CAN_clearGlobalInterruptStatus(CANA_BASE, CAN_GLOBAL_INT_CANINT0);
//
// Acknowledge this interrupt located in group 9
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
//status = 0;
}
//
// End of File
//