请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280041C - 我们注意到、快速估算角度的锯齿形会随着速度的提高而降低。 我们已运行电机 ID 实验室来确定电机参数、并且至少 Rs 与我们的测量结果相吻合
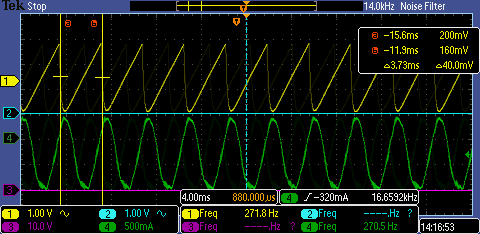
- 速率达到350Hz (我们的8极对电机为2625RPM)会导致以下结果:
CH1 (黄色)是估算角度、青色(ch3)是霍尔传感器输出。
快速估算速度约为350Hz、但实际上电机以370Hz 的频率旋转。 估算角度周期也为370Hz。 我们认为、取整部分是由于我们在 PWM 输出端添加了1KHz RC 滤波器、与估算器速度误差无关。
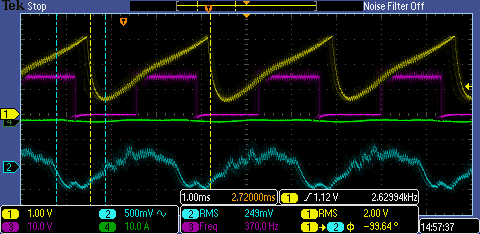
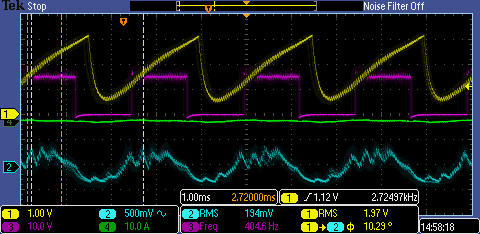
- 将命令速度增加到375Hz 会导致以下示波器波形:
估算角度失真更大、估算速度比实际速度400Hz 更远。 角度也在400Hz 下循环、但估算速度约为375Hz (与指令相同)
如果我们命令320Hz 或更低、估算速度对应于命令的和霍尔传感器速度。 FAST 估算器中是否有一些输入参数或其他我们可以调整的参数、以便在更高的速度下提高估算的速度精度?