主题中讨论的其他器件: TMS320F28379D
您好 TI
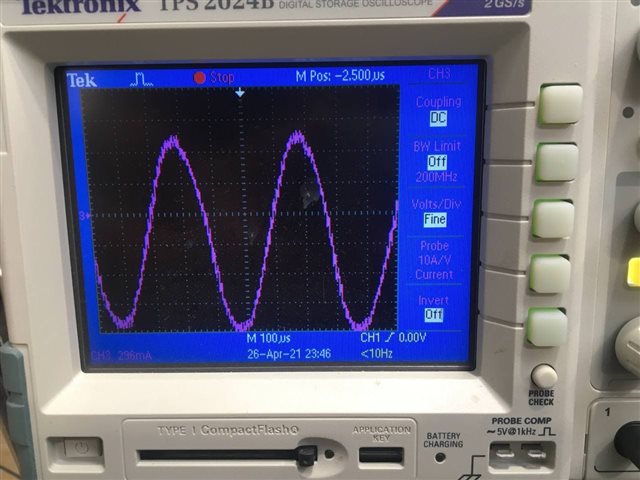
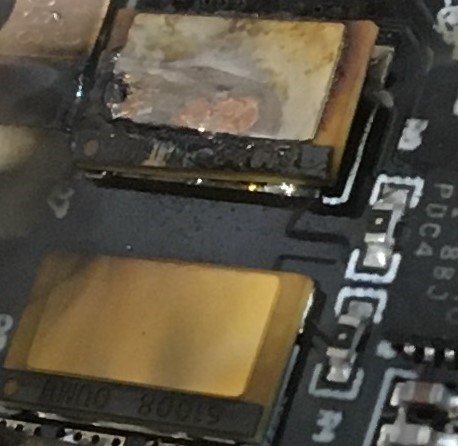
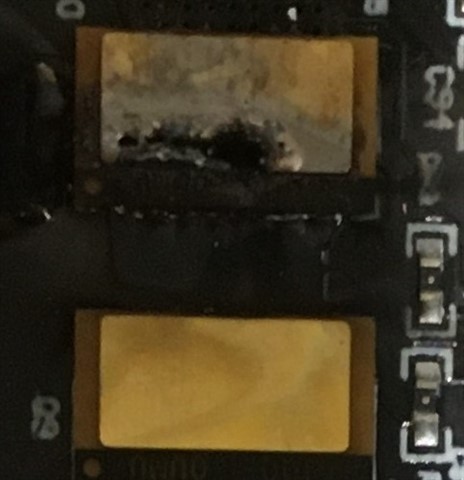
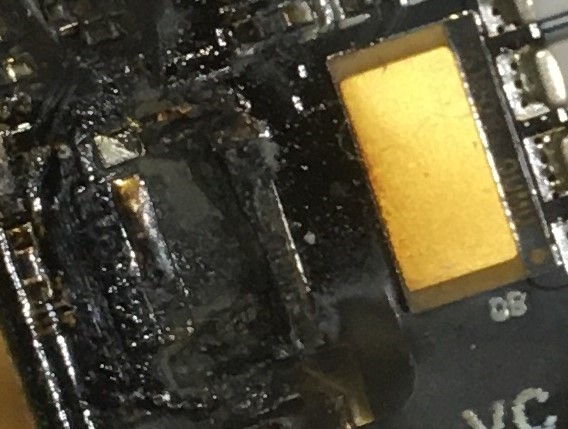
对于我们的高速、超低电感电机、开关会在第一个脉冲中立即突发。
我们成功地运行了电感为300 μ H 的电机、但在接下来的电机中、电源开关每次都发生爆炸。
电感为47uH。
#define USER_IQ_FULL_SCALE_FREQ_Hz (1400.0)
#define USER_ADC_FULL_SCALE_VOLTGE_V (120)
#define USER_IQ_FULL_SCALE_CURRENT_A (250.0)
#define USER_ADC_FULL_SCALE_CURRENT_A (250.0)
#define USER_PWM_FREQ_kHz (100.0)
#define USER_MAX_VS_MAG_PU (0.6666)
#define USER_NUM_PWM_TICKS_PER_ISR_TICK (3)
#define USER_NUM_ISR_TICKS_PER_CTRL_TICK (1)
#define USER_NUM_CTRL_TICKS_PER_CURRENT_TICK (1)
#define USER_NUM_CTRL_TICKS_PER_EST_TICK (1)
#define USER_NUM_CTRL_TICKS_PER_SPEED_TICK (90)
#define USER_NUM_CTRL_TICKS_PER_TRAJ_TICK (90)
#define USER_R_OVER L_EST_FREQ_Hz (300)
定义 USER_ZEROSPEEDLIMIT (2 / USER_IQ_FULL_SCALE_FREQ_Hz)
#define USER_VOLTGE_FILTER_POLE_Hz (1200.0)
#define USER_MOTOR_TYPE MOTOR_Type_PM
#define USER_MOTOR_NUM_POLE_PAIRS (1)
#define USER_MOTOR_RR (空)
#define USER_MOTOR_Rs (0.02)
#define USER_MOTOR_LS_d (0.000047)
#define USER_MOTOR_LS_q (0.000047)
#define USER_MOTOR_Rated 磁通(0.0148)
#define USER_MOTOR_磁 化电流(空)
#define USER_MOTOR_RES_EST_CURRENT (1.0)
#define USER_MOTOR_IND_EST_CURRENT (-0.5)
#define USER_MOTOR_MAX_CURRENT (100)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0)
有人有类似的经历吗? 如何防止这种情况并运行电机。
非常感谢