主题中讨论的其他器件:DRV8320
SDK 实验室指南提供了一些非常重要的5.1设置细节、这是必备条件。 在自动识别和首次运行后、我的电机变得非常热。 SDK 具有针对满量程频率的默认20Hz 预设。 那么、如果没有多个指南来查找5.1信息或烧毁电机、那么任何人都知道这是什么目的!
我们如何知道 InstaSpin 电机自动 ID 的20Hz 是预期频率还是所需的满量程频率? 此外、在自动识别之前、所有3个电机相位都处于全+Vbus 电平、对 HV 电机而言非常危险。 在空闲时间内保持相电压关闭是业界最佳做法、为什么 TI 工程师不采用最佳可接受的做法?
5.1.
软件必要条件
以下是需要在用户软件中进行配置以管理电机信号的参数
FAST 观测器所需的所有信号。 本节将讨论每个参数。
•IQ 满量程频率-设置为电机的最大电频率、留20-30%余量
•IQ 满量程电压-设置为电机的最大电压、留20-30%余量
•IQ 满量程电流-设置为电机的最大可测量电流、留20-30%余量
•最大电流-设置为电机制造商的最大电流(峰值)、余量为0%
•抽取率-多个环路速率和设置
•系统频率-设置为 MCU 的最大 CPU 时钟速度
•PWM 频率-默认值为20KHz、随电感较低的电机而增加
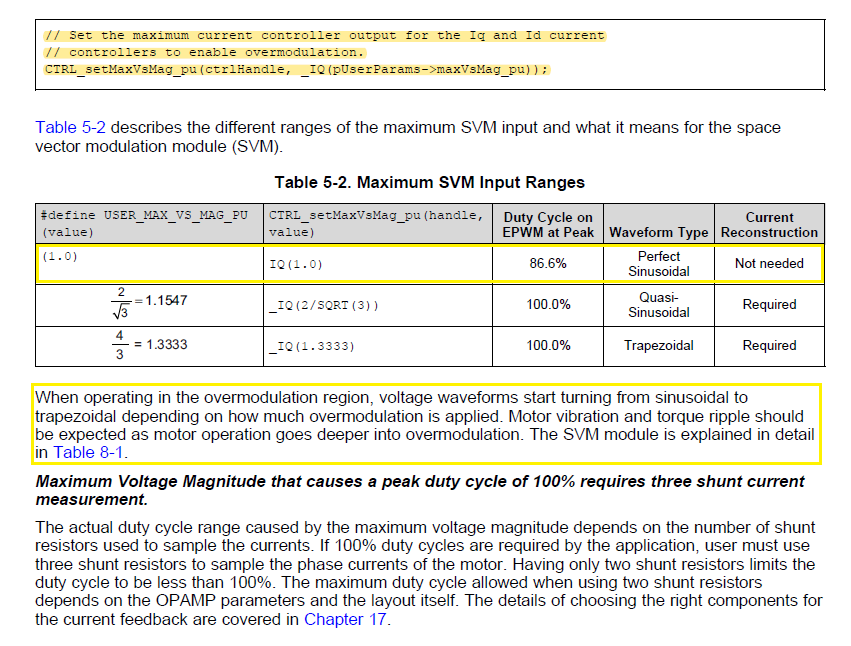
•最大占空比- 100%占空比使用3分流电流测量
以下是 SDK 提及在 user.h 中预设的用户参数:
在识别电机参数之前,可以在“user.h”中填充一些值。
USER_MOTOR_TYPE = MOTOR_TYPE_PM 或 MOTOR_TYPE_归纳 必须知道电机类型并将其输入此参数。
USER_MOTOR_NUM_POLE_PAIRS 电机的极对数
USER_MOTOR_MAX_CURRENT 电机铭牌上的最大电流
USER_MOTOR_RES_EST_CURRENT 识别期间、电机必须首先以开环方式启动。 该值设置电机初始启动期间使用的电流峰值。 如果电机具有高齿槽扭矩或某种负载、请增大此电流值、直到电机开始旋转。 电机识别后、不使用该值。
对于 ACIM 电机、 USER_MOTOR_IND_EST_CURRENT 必须为零。 对于 PMSM 电机、该值可设置为 USER_MOTOR_RES_EST_CURRENT 所用电流的负值。 例如、如果 USER_MOTOR_RES_EST_CURRENT 为1.0、则 USER_MOTOR_IND_EST_CURRENT 可以为-1.0。
USER_MOTOR_NUM_POLE_PAIRS 电机的极对数
对于 PMSM 电机、 USER_MOTOR_Rated 磁通必须为零。 对于 ACIM 电机、额定磁通应设置为铭牌值、计算如下:
USER_MOTOR_RAGE_FLUX = SQRT (2)/SQRT (3)* RAGE_VAC/RAGE_F、因此对于额定频率为60Hz 的220VAC 电机、额定磁通为:
USER_MOTOR_RAGE_FLUX = SQRT (2)/SQRT (3)*2200/60.0 = 2.9938
USER_MOTOR_FLUX_EST_FREQ_Hz 该频率的起始点、如果电机是 PMSM 电机、则为20.0Hz、如果是 ACIM 电机、则良好的起始点为5.0Hz。