在具有板载 TMS320F280041C 的定制电机控制板上运行 CC 版本9.3。 编译器 TI v18.12.5.LTS、C200Ware 2.00.03版、电机控制 SDK 2.00.00.00。
我们尝试使用 实验 is07 (在《InstaSPIN 项目和实验用户指南》中介绍的 Vers 1.00.00.00)在无传感器模式下运行 PMSM、同时启用 FAST 算法和强制角、并将1Hz 切换到 FAST。 电机的最大速度为370Hz、但当要求大于200Hz 时、电机会跳闸。 从用户指南第14章和以前的文章中、如:
https://e2e.ti.com/support/microcontrollers/c2000/f/171/p/502880/1821864#1821864
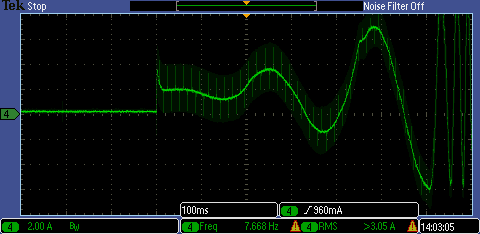
我们认为、我们需要通过执行离线 Rs 反转来首先对齐转子。 在运行 is07之前、在代码的初始化部分中启用 Rs recal 标志:motorVars.flagEnableRsRecalc 不起作用。 实际上、电机电流随着电流振荡而蜂鸣、并呈指数级增长、直到电机电流跳闸。
在启动时对齐转子的正确代码应该是什么、然后 IS07代码是否可以运行以使电机旋转至或接近其最大速度?
我们还注意到、当给出新的速度命令时、速度会振荡。 它最终稳定下来、但我们知道我们需要调整速度环路。
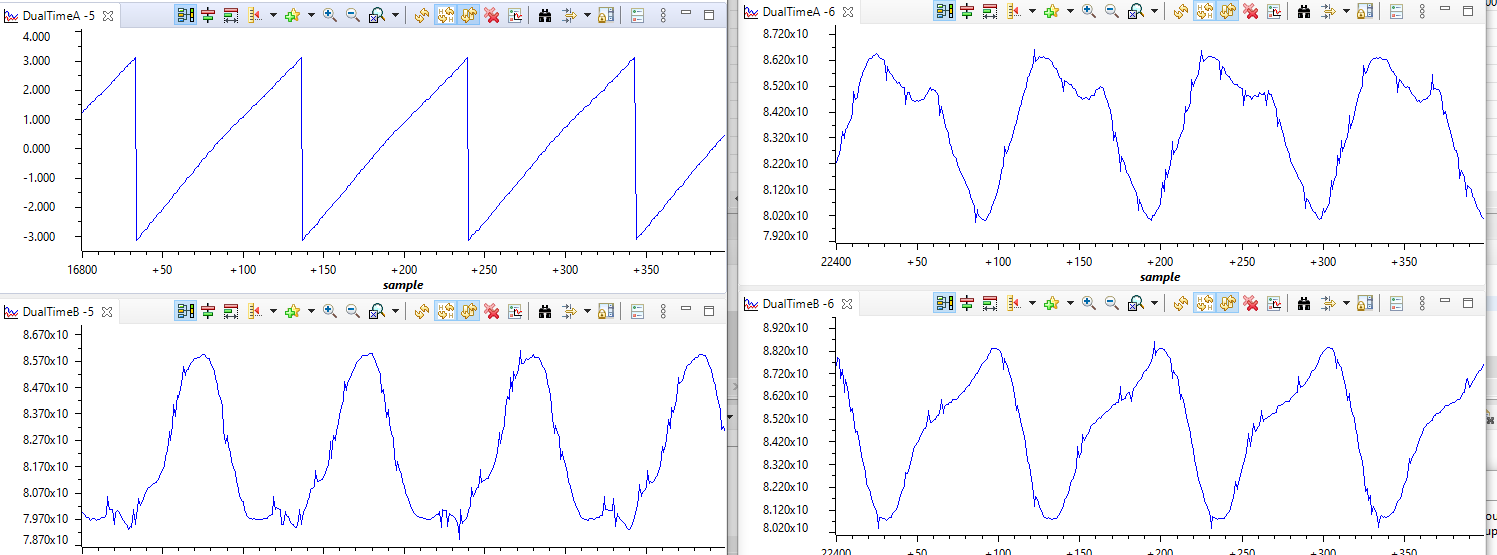
运行 is04实验时,我们注意到角度发生器输出为0到2*PI。 在运行 is07实验时、我们注意到快速角度输出为-PI 到+PI。 这是否会导致 PI 的相位偏移、从而阻止电机达到高速? 如果是、是否有调整的方法?
我们还注意到、user.h 参数与《InstaSPIN-FOC 用户指南》SPRUHJ1H (2019年6月)中的参数不完全匹配、因此调试更困难。
提前感谢您的帮助。