请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28377D 主题中讨论的其他器件: C2000WARE
工具/软件:Code Composer Studio
。、我最近在调试 CAN 通信时遇到了一些问题
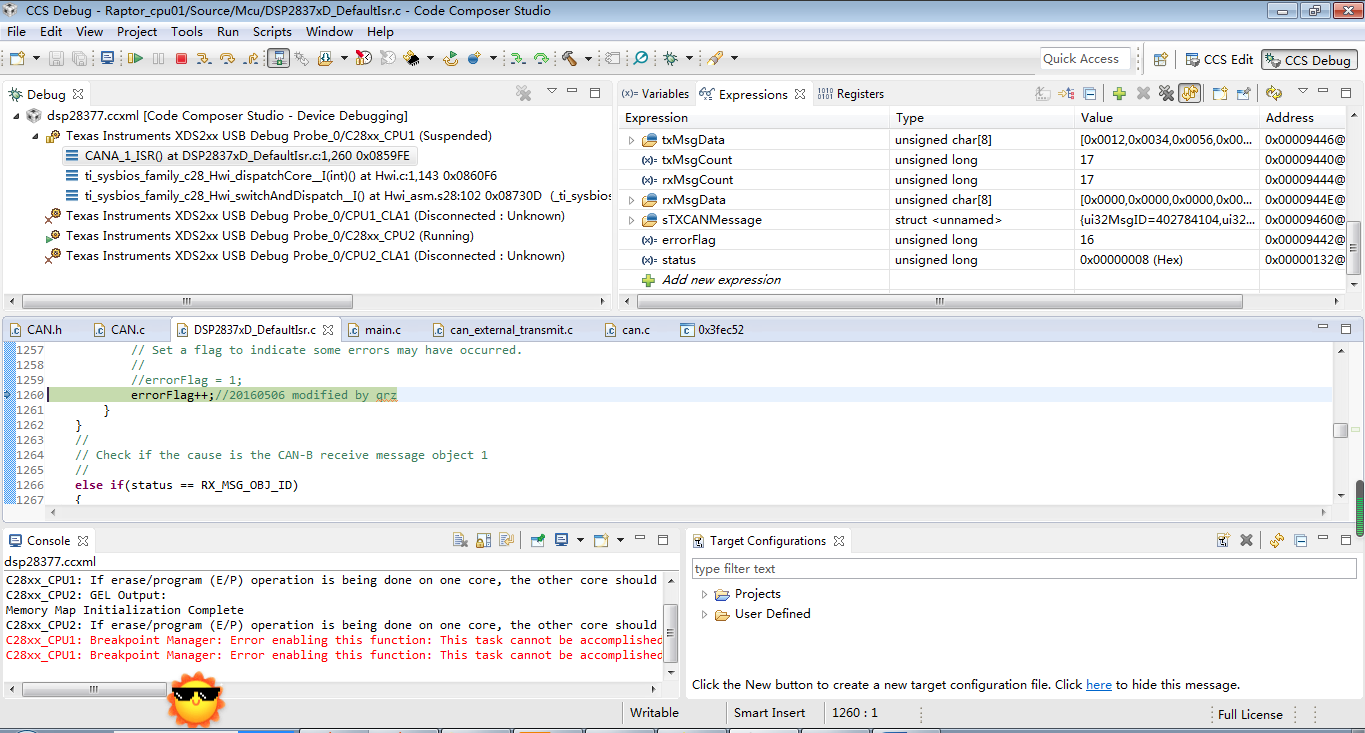
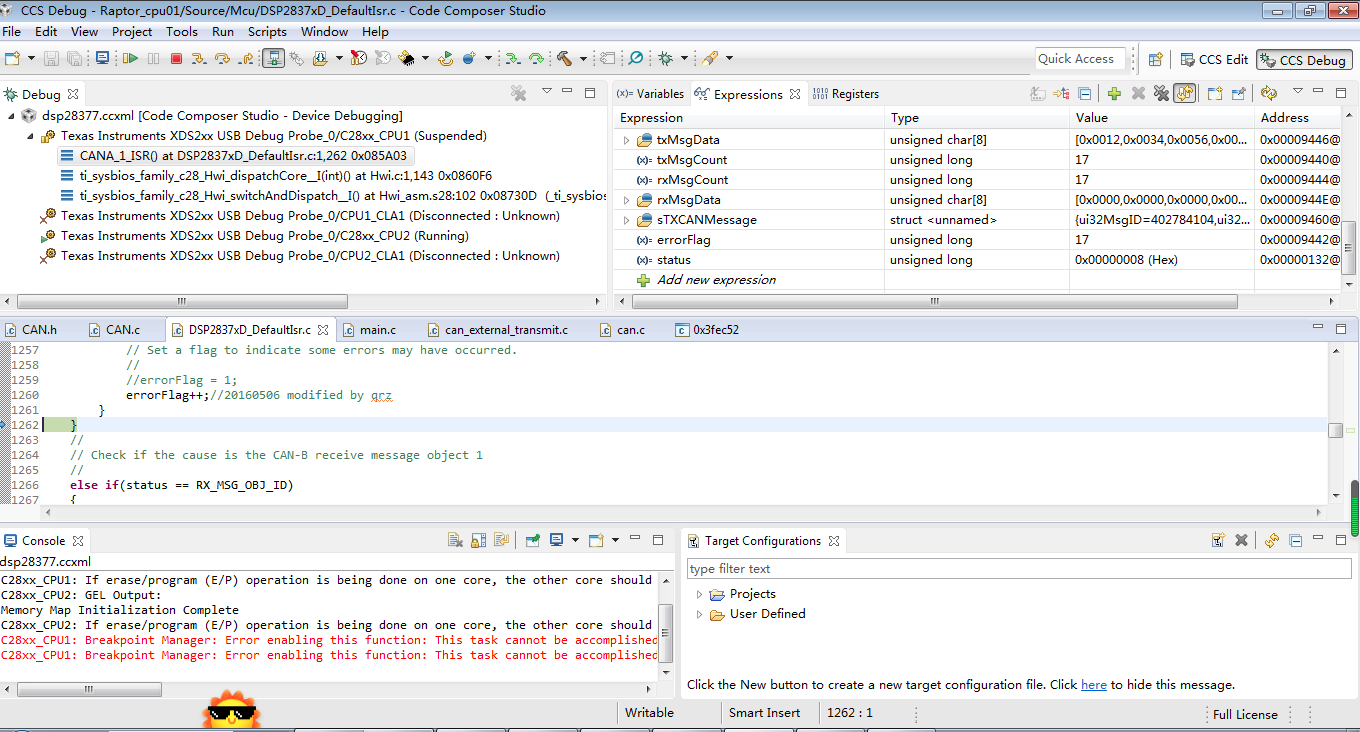
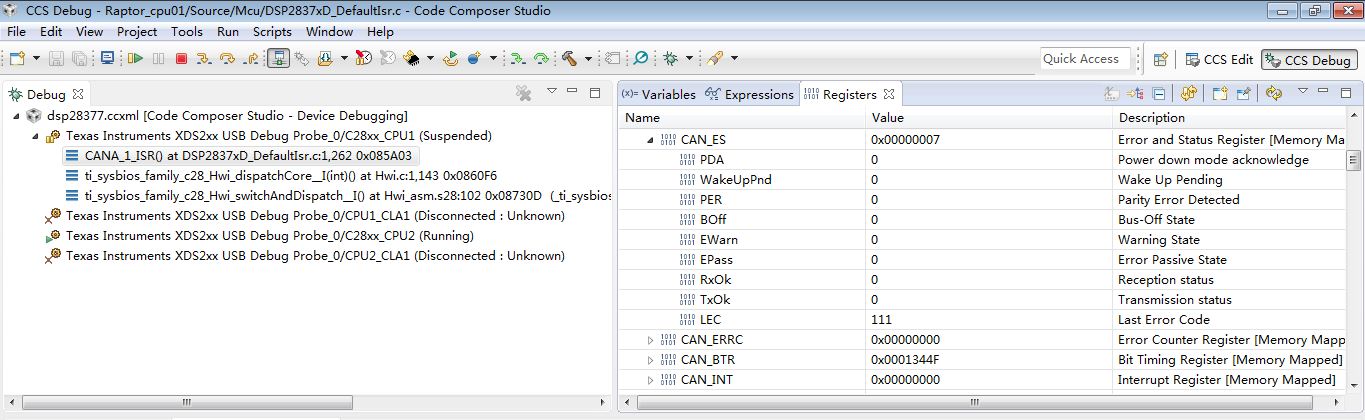
首先、我使用 TMS320F28377D 代码示例/所有 CPU1示例/ CAN_EXTERNAL_Transmit 来调试 CAN 并定义 TX_MSG_OBJ_ID 2;RX_MSG_OBJ_ID 1。我可以接收消息并重新传输消息、但遇到一些错误。 如图1-3所示、
状态= CANIntStatus (CANA_base、CAN_INT_STS_CAUST);àstatus = 0x00008000
状态= CANStatusGet (CANA_base、CAN_STS_CONTROL);à 状态= 0x00000008
我如何处理这些道具?为什么?
其次、我可以接收特定 ID (0x00005555)的消息。 但是、如果我想首先接收所有消息、然后判断是否使用了 ID。 如何配置 sRXCANMessage 结构?
sRXCANMessage.ui32MsgID = 0x00005555;
sRXCANMessage.ui32MsgIDMask = 0;
sRXCANMessage.ui32Flags = MSG_OBJ_RX_INT_ENABLE;
sRXCANMessage.ui32MsgLen = MSG_DATA_LENGTH;
sRXCANMessage.pucMsgData = rxMsgData;
CANMessageSet (CANA_base、RX_MSG_obj_ID、sRXCANMessage、
MSG_OBJ_TYPE_RX);
非常感谢!
此致。