请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
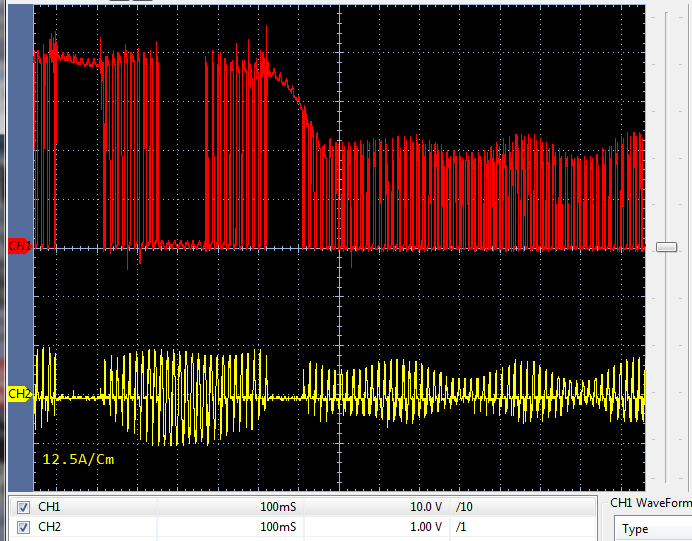
器件型号:LAUNCHXL-F280049C SDK (FOC)状态机似乎没有任何优势、对 x49c 硬件非常粗鲁! 没有软启动(RAMP_UP)状态机粗鲁地限制进入 EST_State_RS 的相电流。
问题是2倍、因为它需要过多的 ADC 通道输入电容来抵消瞬时启动周期电流尖峰。
超过2200pF 的低通滤波器只是一种粗略的计数器测量、它会导致电流波峰峰峰值的峰值(瞬态)挂起时间。 我们在其他 HV 系统中添加(0)电容、因为预计外部差分放大器会产生1nF 负载。 任何添加低通滤波器电容的尝试都会改变电流放大器的精度并为一方带来瞬态挂起时间。
也就是说 、EST_State_ROVERL 和 EST_State_RS 之间为什么没有上升等待时间? 这几种粗略的方法是否会导致本实验中某一点的所有情况都出现下降?
为什么 EST_State_CONSTSPEED 和 EST_State_RatedFLUX_OL 之间没有软电流启动?
是否可以添加软启动(WAIT_TIME) BEGIN EST_State_RS 以阻止其满贯 CCMPS 的 DAC? 则可以使用合理的旁路滤波器值、而不是2200pF。 此外、这一缺失的等待时间似乎也会导致 CMPSS DACA/B 滤波器出现重大问题、需要更高的值来抵消在状态机进一步变为电机 ID 过程之间发生的瞬态尖峰。