请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8312-69M-KIT
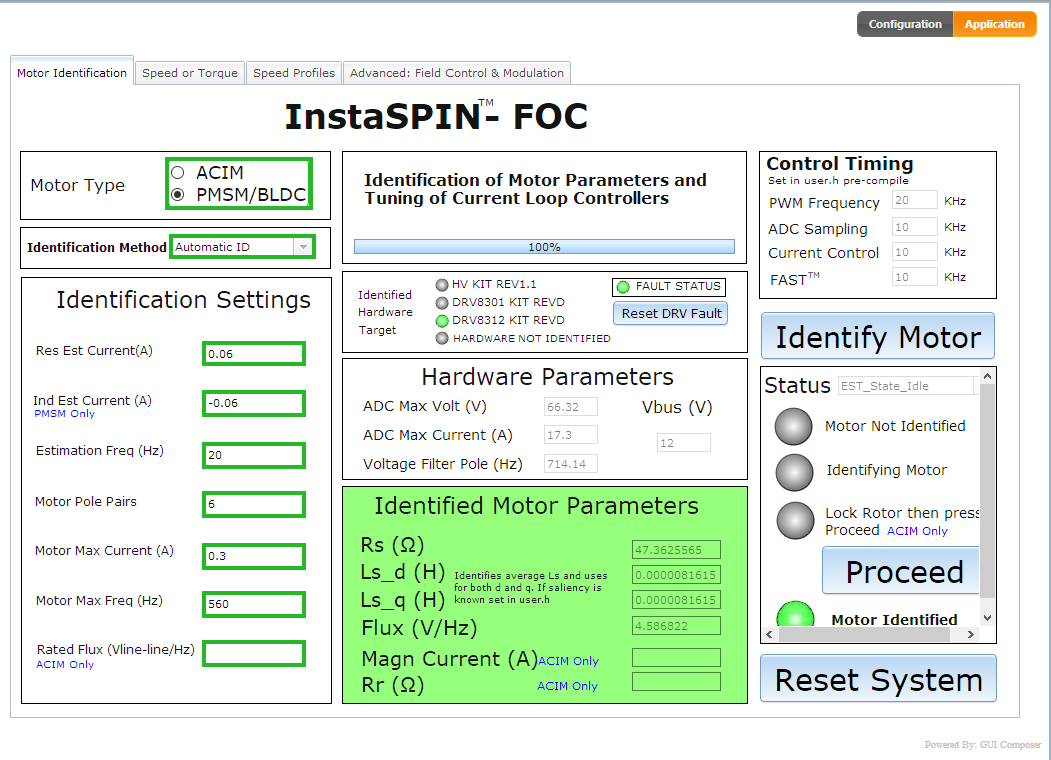
因此、我目前正在尝试为 DRV8312 EVM 套件设置电机。
使用的电机是一个 Premotec BL21EE (此处提供数据表)
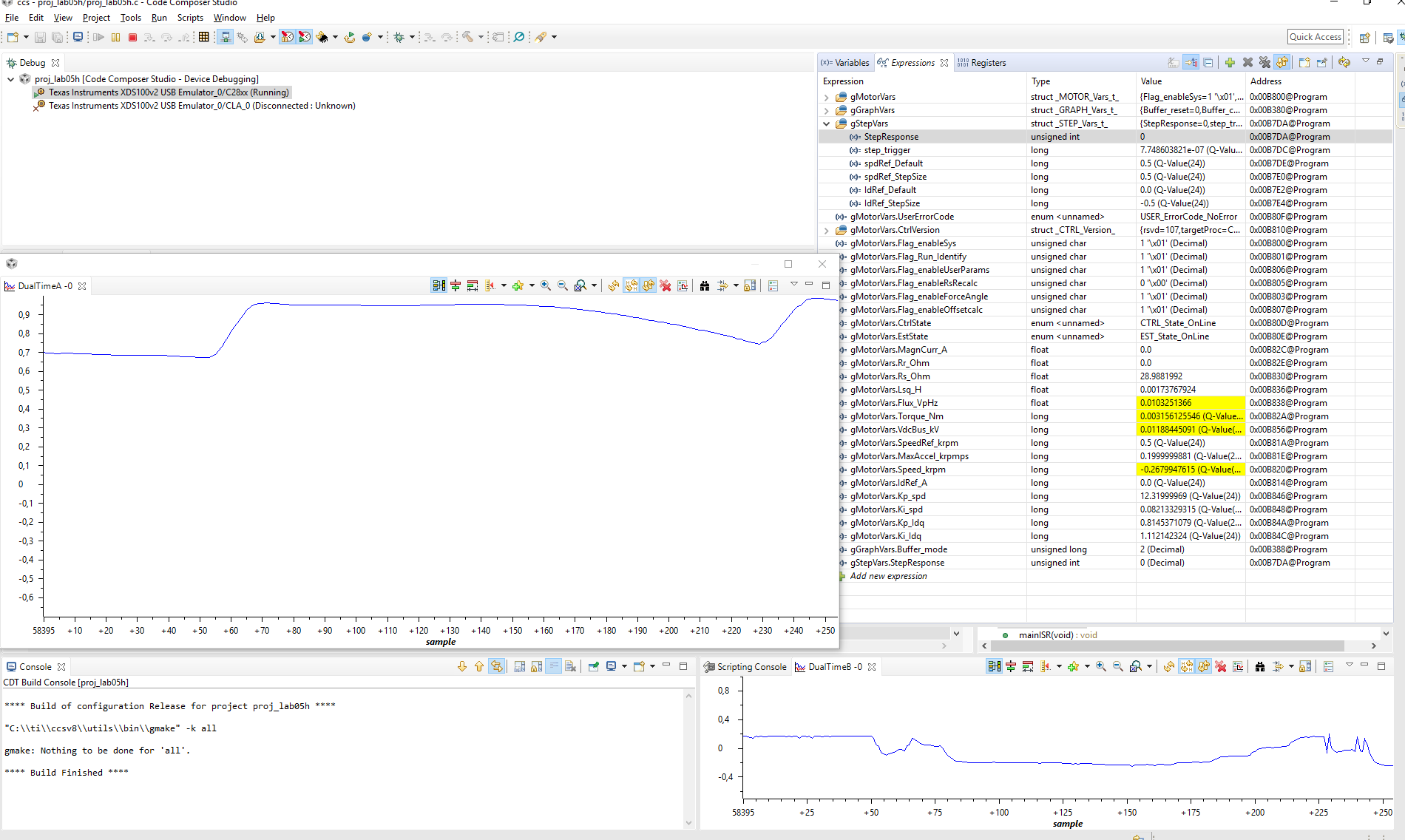
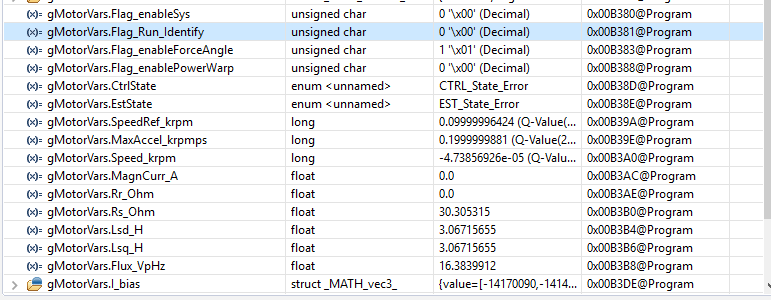
当我尝试运行 motorware lab02b 或 lab02c 时、我会得到一 个非常高或非常低的 USER_MOTOR_LS_d
我取决于用于识别电机的电流
如果我使用类似的东西
#define USER_MOTOR_RES_EST_CURRENT (0.1)
#define USER_MOTOR_IND_EST_CURRENT (-0.1)
我将得到以下值:

或者、如果我使用0.25等更高的电流-我将获得与以下类似的更高 LSQ_H:
两个值都将触发任一错误
USER_ErrorCode_ctrlFreq_Hz_Low
或
USER_ErrorCode_ctrlFreq_Hz_High
由于它在量表的不同端结束、我会怎么做?
电机在识别过程中运行、从我的12V PSU 汲取的电流约为0.34-0.4A。
是否应该设置一些以前的值?
这是我的电机防御:
//! 简要介绍用户电机和 ID 设置 // //! \brief 使用唯一的名称和 ID 号// BLDC & SMPM 电机 #define Estun_EMJ_04APB22定义每个电机 101 #define Anaheim_BLY172S 102 #define teknic_2310P 108 #define My_Motor103 // IPM 电机 //如果用户提供单独的 Ls-d、Ls-q //否则使用用户或已识别的平均 Ls #define Belte_Drive_W垫 圈_IPM 处理 SPM 201 // ACIM 电机 #define Marathing_5K33GN2A 301 //! \brief 取消注释编译 //时应包含的电机! \brief 然后、这些电机 ID 设置和电机参数可供控制系统使用 //! \brief 确定理想设置和参数后、请更新此处的电机部分、使其以二进制代码 //#define USER_MOTOR_Estun_EMJ_04APB22 //#define USER_MOTOR_Anaheim_BLY172S #define USER_MOTOR_My_MOTOR//#define USER_MOTOR_GET_LEMOTOR_INMOTOR_INMOTOR_INMOTOR_INTE= #define AP0232A #define AP_MOTOR_MOTOR_MOTOR_EMJ=#define APJ_MOTOR_TOMENT_TOUN_TOTOR_TOUN_TOMENS //名称必须与电机#define #USER_MOTOR_TYPE 相匹配 Motor_Type_Pm // Motor_Type_Pm (全部同步:BLDC、PMSM、SMPM、IPM)或 Motor_Type_Induction (异步 ACI) #define USER_MOTOR_NUM_POLE_PAIRS (4) //对、而不是总极数。 仅用于根据转子 Hz 计算用户 RPM #define USER_MOTOR_RR (空) //仅感应电机,否则为 NULL #define USER_MOTOR_Rs (2.303403) // Y 等效电路中识别的相位到中性点电阻(欧姆、浮点) #define USER_MOTOR_LS_d (0.008464367)//对于 PM、确定的平均定子电感(亨利、浮点数) #define USER_MOTOR_LS_q (0.008464367)//对于 PM、识别出的平均定子电感(亨利、浮点数) #define USER_MOTOR_RATGED_FLUX (0.38) //确定转子和定子之间的总磁链(V/Hz) #define USER_MOTOR_磁 化电流(NULL) //仅感应电机、否则为 NULL #define USER_MOTOR_RES_EST_CURRENT (1.0) //在电机识别期间、用于 Rs 估算的最大电流(安培、浮点数)、10-20%额定电流 #define USER_MOTOR_IND_EST_CURRENT (-1.0) //在电机识别期间、用于 LS 估算的最大电流(负安培、浮点数)、只需足够的时间即可启用旋转 #define USER_MOTOR_MAX_CURRENT (3.82) //严重:在 ID 和运行时使用、设置所提供速度 PI 控制器到 IQ 控制器 #define USER_MOTOR_FLUX_EST_FREQ_Hz 的最大电流命令输出的限制 (20.0) //在电机识别期间、最大命令速度(Hz、浮点)、~10%额定 #elif (USER_MOTOR== Anaheim _BLY172S) #define USER_MOTOR_TYPE Motor_Type_Pm #define USER_MOTOR_NUM_POLE_PAIRS (4) #define USER_MOTOR_RR (空) #define USER_MOTOR_Rs (0.4051206) #define USER_MOTOR_LS_d (0.0006398709) #define USER_MOTOR_LS_q (0.0006398709) #define USER_MOTOR_RATed_FLUX (0.03416464) #define USER_MOTOR_磁 化电流(NULL) #define USER_MOTOR_RES_EST_CURRENT (1.0) #define USER_MOTOR_IND_EST_CURRENT (-1.0) #define USER_MOTOR_MAX_CURRENT (5.0) #define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0) #define USER_MOTOR_FREQ_LOW(10.0)// Hz -建议设置为额定电机频率的10% #define USER_MOTOR_FREQ_HIGH(100.0)// Hz -建议设置为额定电机频率 的100%#define USER_MOTOR_FREQ_MAX(120.0)// Hz -建议设置为 USER_MOTOR_FREQ_MAX ( #define 3.0)// VOLT 的120%VOLT -建议设置为额定电机电压 #define USER_MOTOR_VOLT_MAX(18.0)//伏特-建议设置为额定电机电压 #Elif (USER_MOTOR== My_Motor) #define USER_MOTOR_TYPE 的100% Motor_Type_Pm #define USER_MOTOR_NUM_POLE_PAIRS (6) #define USER_MOTOR_RR (空) #define USER_MOTOR_Rs (30.2) #define USER_MOTOR_LS_d (空) #define USER_MOTOR_LS_q (空) #define USER_MOTOR_RATed_VLUX (空) #define USER_MOTOR_磁 化电流(空) #define USER_MOTOR_RES_EST_CURRENT (0.1) #define USER_MOTOR_IND_EST_CURRENT (-0.1) #define USER_MOTOR_MAX_CURRENT (0.3) #define USER_MOTOR_FLUX_EST_FREQ_Hz (40.0) #define USER_MOTOR_FREQ_LOW(10.0)// Hz -建议设置为额定电机频率的10% #define USER_MOTOR_FREQ_HIGH(500.0)// Hz -建议设置为额定电机频率 的100%#define USER_MOTOR_FREQ_MAX(600.0)// Hz -建议设置为 USER_MOTOR_FREQ_MIN (3.0V/V)//额定 电机频率的120%VOLT -建议设置为额定电机电压 的15%#define USER_MOTOR_VOLT_MAX(12.0)//伏特-建议设置为额定电机电压的100%