

主题中讨论的其他器件:LAUNCHXL-F280049C、 TMS320F280041C、 BOOSTXL-DRV8320RS、 MOTORWARE、 C2000WARE、
客户希望使用 我们的 TMS320F280041C 设计系统。 他们一直在使用 LAUNCHXL-F280049C + BOOSTXL-DRV8320RS 套件和 MotorWare 评估软件。
为了使用此 MCU、最近发布了一个新的 SDK (例如 C2000Ware_MotorControl_SDK_2_01_00_00)。 这是我们最初使用旧版 MCU 评估的 MotorWare 的一个主要平台变化。
1.是否有任何文档涉及:
- 从 MotorWare 更改为 MotorControl SDK?
- 新 SDK 的发展蓝图?
- 如何使用此新 SDK 开发用户应用?
- 是否仍支持 MotorWare? 是否有迁移文档?
2.对于我们的应用、我们将需要添加 CAN 通信和一种无需重新编译即可更改电机参数/设置的方法。 我的计划是保留两个闪存段、这些段将保存我们能够通过串行或 CAN 链路更改的电机/应用参数。 在新 SDK 中添加此代码的预期方式是什么? 是否有任何 HAL 支持此开发和/或我们应该使用的其他库。 基本上,我想知道我们应该采用什么理想的开发策略来确保我们以适合 SDK 的方式开发用户代码,以便我们可以利用 TI 将来推出的任何软件来加快开发进度。
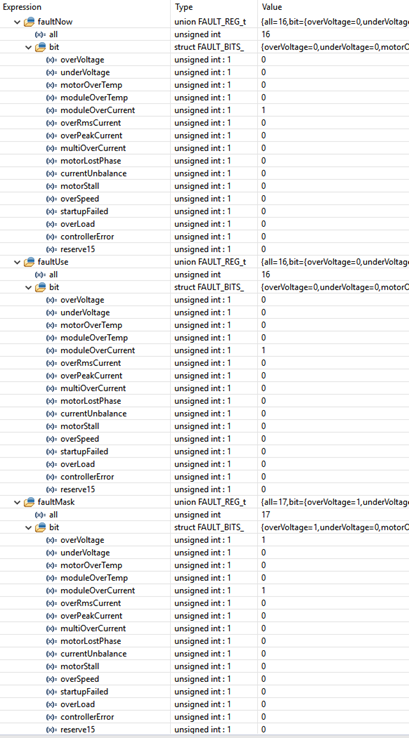
3.我注意到这一新平台已完全改造。 有几个新功能,“user.h”文件几乎与旧文件完全不同。 我们发现的新功能之一是故障寄存器。 此功能是有效还是保留供以后使用? 我们在原始平台上发现的一个缺陷是、缺少针对过压/欠压和过温/欠温等问题的原生故障保护。 这是一个令人兴奋的功能、但我找不到如何使用它–代码似乎被锁定在编译的库中。 如果我们可以使用 instaspin 在本地检测到以下所有故障、则使用这些故障将非常有用。
我们在初始编译代码时也遇到了一些问题、因为现在我们需要在两个位置存储电机参数。 第一个位于“user.h”中,现在“user.c”中还有另一个部分,其中包含一些硬编码的电机参数。

此部分包含带宽和惯性参数。 这些参数历来与运动相关,不用于 FOC。 但是,我的理解是41/49 MCU 仅支持 FOC。 您能不能评论这些参数是什么以及我们应该如何使用它们和/或派生它们,因为我不相信我们会从 ID 周期获得它们。
谢谢你
Viktorija
