

主题中讨论的其他器件:DRV8301
您好!
在 LaunchXL F28069M http://www.ti.com/tool/LAUNCHXL-f28069M + BoostXL DRV8301 http://www.ti.com/tool/BOOSTXL-DRV8301上运行低电感高速电机时遇到问题
这是我的电机
电机类型:PMSM
相位数:3.
极对数:5 (共10个极)
绕组配置:3个 Y 形连接的线圈
相间电阻:1.4欧姆
相间电感:0.66mH
Kt = 6.3mNm/A
这是12V FOC 中的转矩速度曲线

因此、在低速时、我们具有大约18mNm 的电流、并且电流应该大约为3A。我想使用12V FOC 将电机推至25krpm。
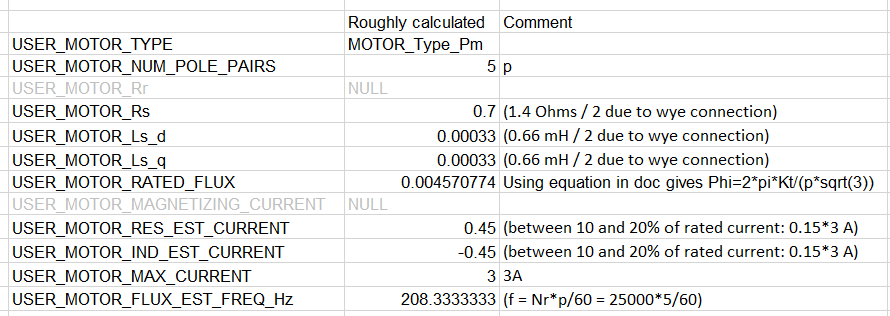
按照 InstaSPIN 文档中的指导原则、我应该围绕这组参数进行识别:
为了识别我的电机、我在 ChristiClearman 的帖子中使用了他的建议:
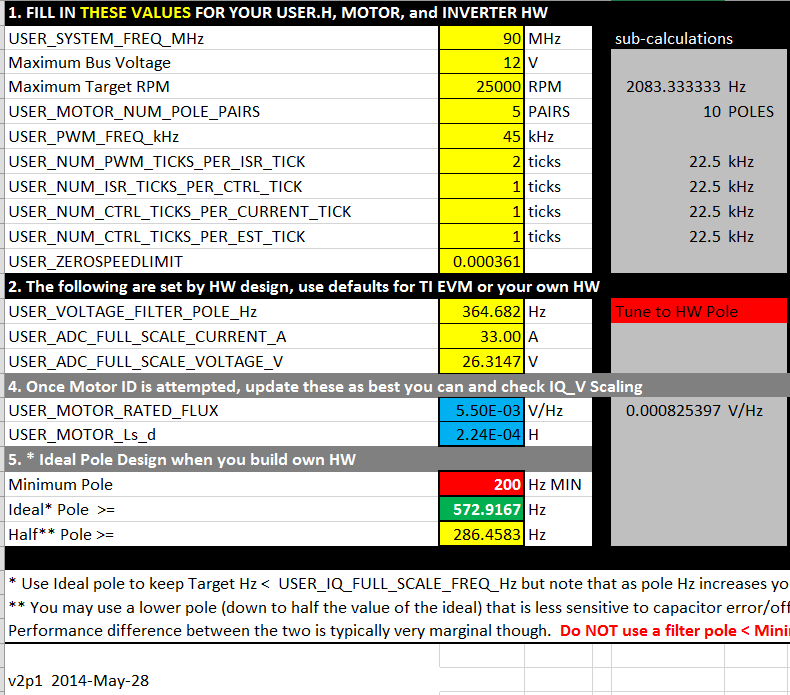
设置 user.h
https://e2e.ti.com/support/microcontrollers/c2000/f/902/t/319433
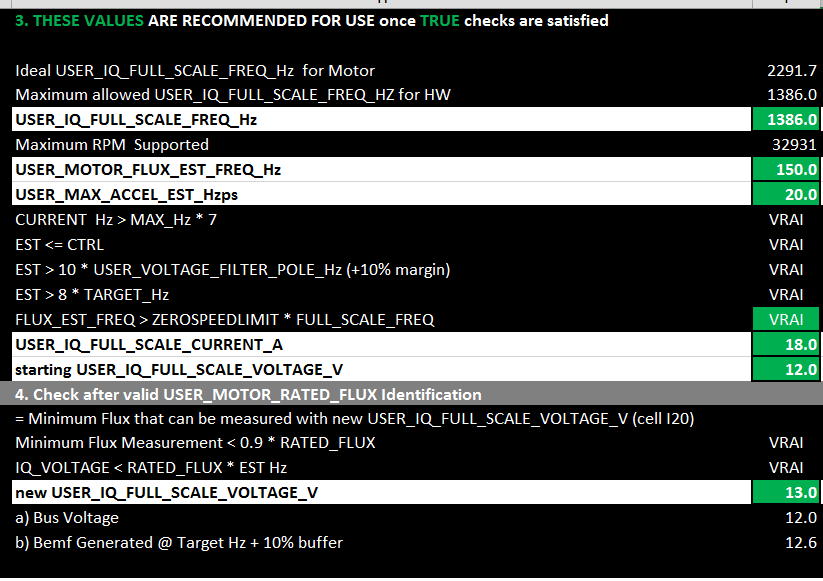
Vrai (FR)表示 true (EN)
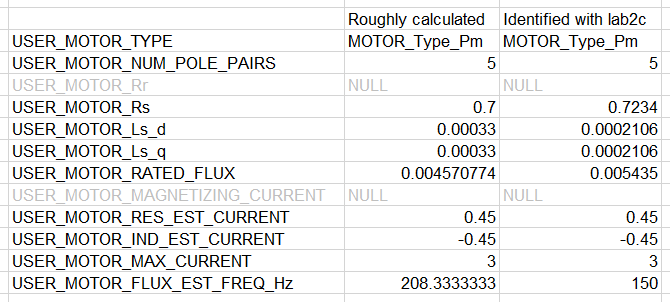
我可以运行 lab2c (因为电机电感较低)并识别参数、这为我提供了远低于预期的值:
我还使用了 lab3a 来识别偏置电流和电压值、这些值与这些振幅有关:
i_{A、B、C}_offset (0.9246)
V_{A、B、C}_offset (0.4985)
然后、我使用 lab3c 来转动电机。 我首先以1krpm 的速度基准运行电机。 当它平稳运行时、消耗的电流为0.10A、但有时意外地达到0.43A、并且电机速度在0.4krpm 和1.6krpm 之间振荡。 如果我用手指施加负载、电机通过消耗比空载(0.14A 而非0.10A)更大的电流来平稳运行。
在斜升速度时、同样的振荡问题反复出现(消耗的电流可能高达0.70A)、直到 I 达到13krpm。 在13krpm 时、消耗的电流为0.21A、电机在12.94和13.05krpm 之间平稳运行。
之后、我尝试达到25krpm、但它达到的最大速度为13.1krpm。
如何提高速度? 为什么它无法达到更高的值?
非常感谢您的帮助和祝您愉快的一天、
纪尧姆
以下是我的 user.h 文件
e2e.ti.com/.../8463.user_5F00_j1.h
