请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8301-HC-C2-KIT
大家好、 工程师
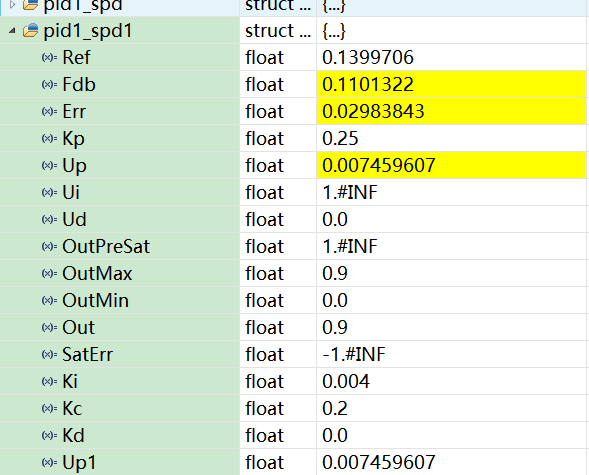
我在使用 DRV830x-HC-C2-KIT 中的 BLDC_sensorless 代码运行 BLDC 电机时遇到问题、当我在速度关闭模式下使用霍尔传感器时、BLDC_sensorless Project 运行良好、速度反馈也可以通过速度 PI 控制器实现参考速度、此外、仅使用 CMTN_TRIG_MACRO (cmtn1)进行换向时、电机也会旋转。 但是、当使用 CMTN_TRIG_MACRO (cmtn1)进行换向和闭合速度模式,反馈速度无法实现命令速度,速度 PI 控制器就像不工作一样、积分的输出几乎为零时、我在下面详细地附上了 PI 输出的图片。
首先,我要向你表示非常感谢。