请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8301-69M-KIT 主题中讨论的其他器件:MOTORWARE、 C2000WARE、 controlSUITE、 DRV8301、 ISO7241A、
我使用 Motorware 实验在一条 SPI 总线上运行2个 Picollo SPI 从站(使用 Raspberry PI 主站)(使用2个地址)。
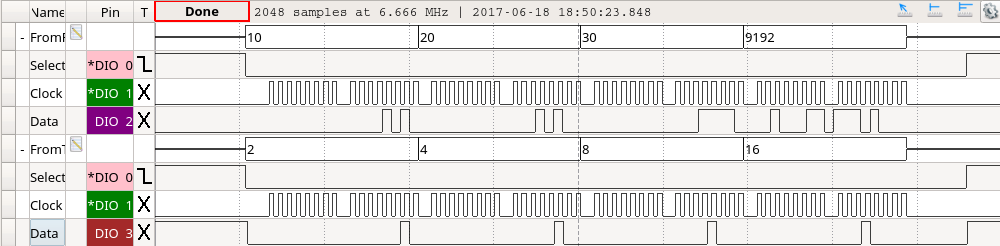
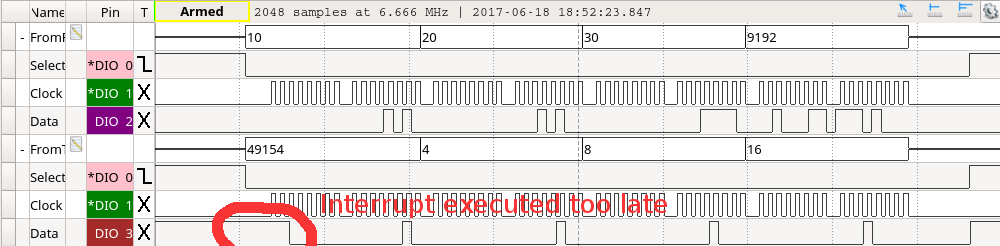
当它们中的每一个单独连接时、一切都正常。 当两者都连接时、从器件到主器件的通信将丢失(SOMI)。 通过数字示波器检查、我的印象是、两个 Picollo 都试图在不活动时(1)将数据线保持在高电平(SOMI 数据线从 Motorware 中实现了低电平有效)。我在数据线上看到许多尖峰、与时钟脉冲不一而不是。
在与知识渊博的人讨论时、他建议在 SOMI GPIO 未处于活动状态时将其切换为输入。
我的问题:
1.为什么在 Motorware 实验中这不是默认设置?
2.如果我想自行修改,最好在哪里进行修改,以实现干净的实施?
3.这是否可以是未来 Motorware 更新的功能请求?
BTW、再次感谢您提供这一出色的平台。 我喜欢为启动器的启动而提供的性能和努力、包括 TI 员工对该论坛的妥善维护。
此致、
Tomas