

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069 主题中讨论的其他器件:TMDSHVMTRPFCKIT、
工具/软件:Code Composer Studio
您好!
我有一个能够以20000 rpm 运行的电机。 我 ´s 使用 Labs (InstaSPIN 项目和实验用户指南) 开始使用 TI-CCS Studio 获得热性能、但我无法使电机以超过4500 rpm 的速度旋转。
n´t 我使用"实验4"(扭矩控制器)并将 gMotorVars.IqRef_A 设置为高参数值(如2或3 (Q-Value (24)))、电机的旋转速度也不会超过4500rpm。 仅当 我使用"Lab 10"时 、我才能够以 比4500 rpm 更快的速度旋转电机、但即使在"Lab 10"中 、我也无法获得高于5900 - 6000 rpm 的转速。
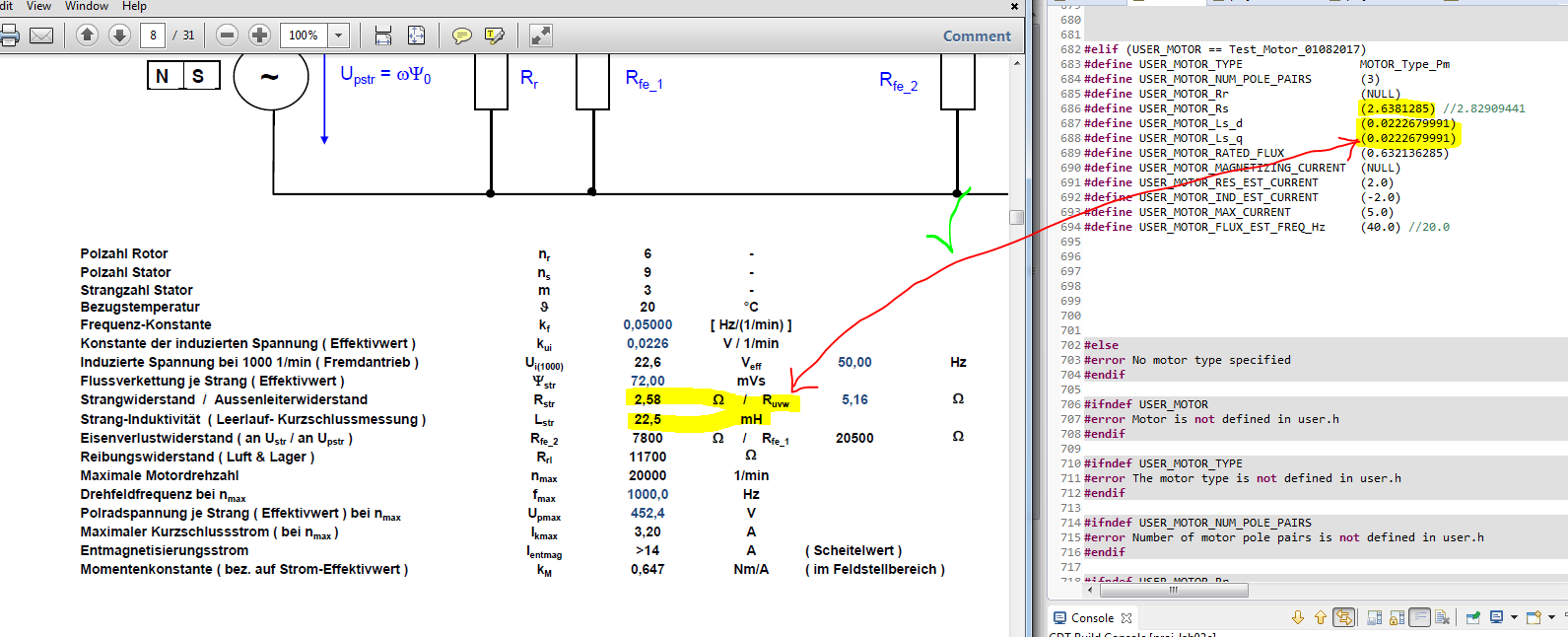
来自第一个实验室的电机参数值测量完美工作:)。 我有一个来自我的电机的数据表、它们非常适合。
数据表:
我将尝试解释设置电机时发生的一些情况、或许这将帮助您 更快地看到我设置中的问题/错误...
当 我启动“电机参数值测量”表单“实验2c” 时:
电机听起来运行速度非常快、但 转速为800 rpm。
我还使用激光转速计测量转速。
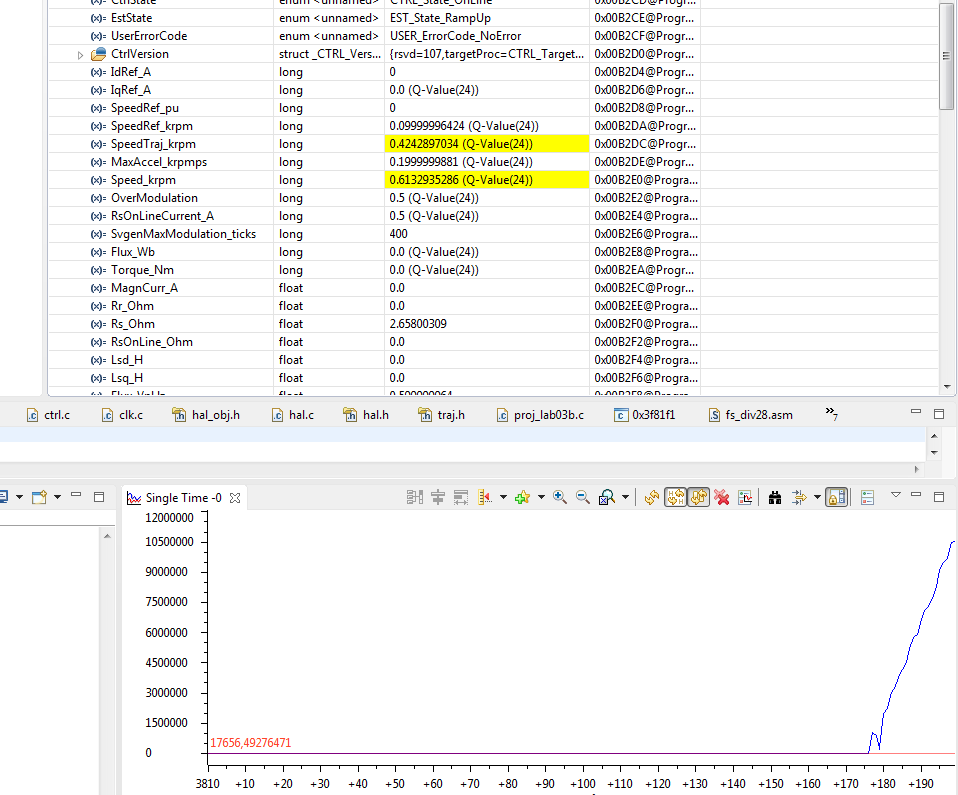
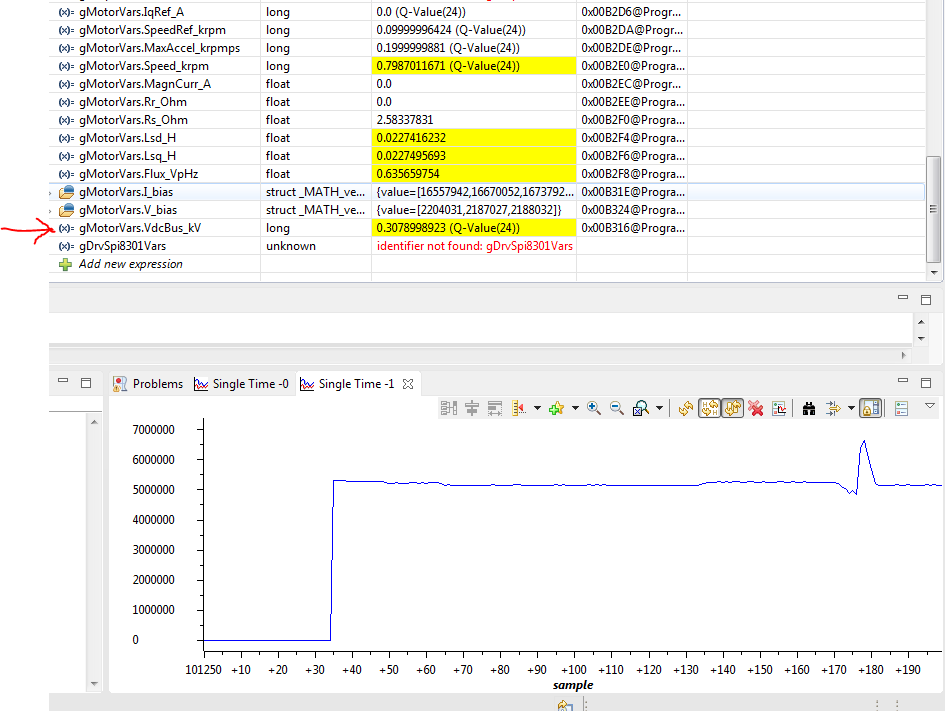
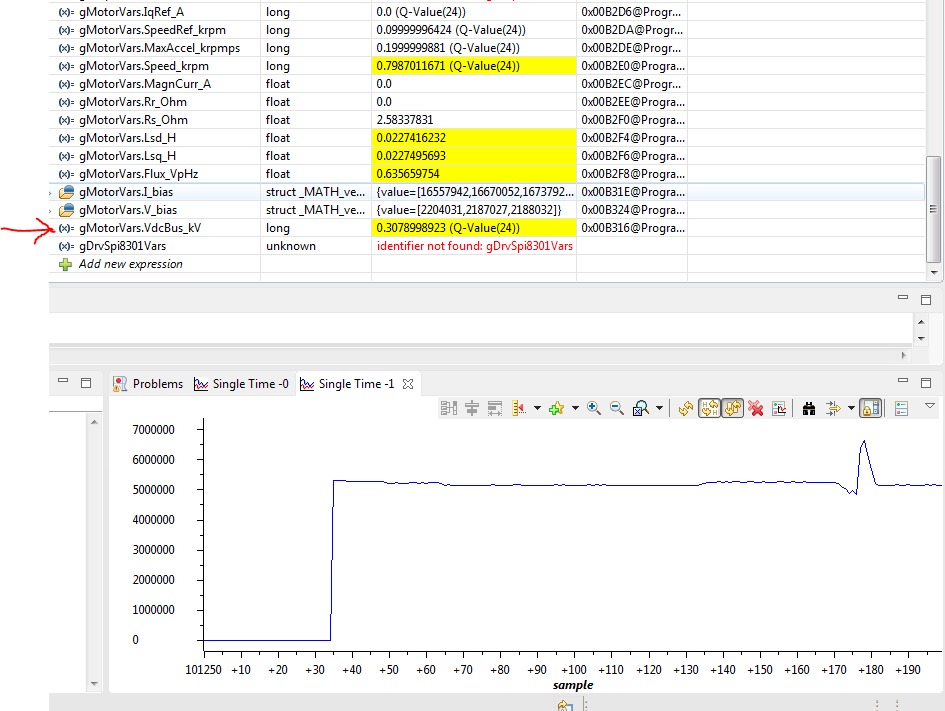
- SpeedTraj_krpm 与"实际"rpm 匹配、而 Speed_krpm 显示了其他的东西?!!? 电机保持稳定时、Speed_krpm 会突然降至"实际"速度(Screenshot 2、Point Nr.1)。 转速为800转/分
-在软件完成 "LSD_H"值测量后、电机以13000rpm (Laser _Tachometer)的转速旋转大约1秒 、然后回到800rpm 。
____________________________________________________________________________________________________________________________
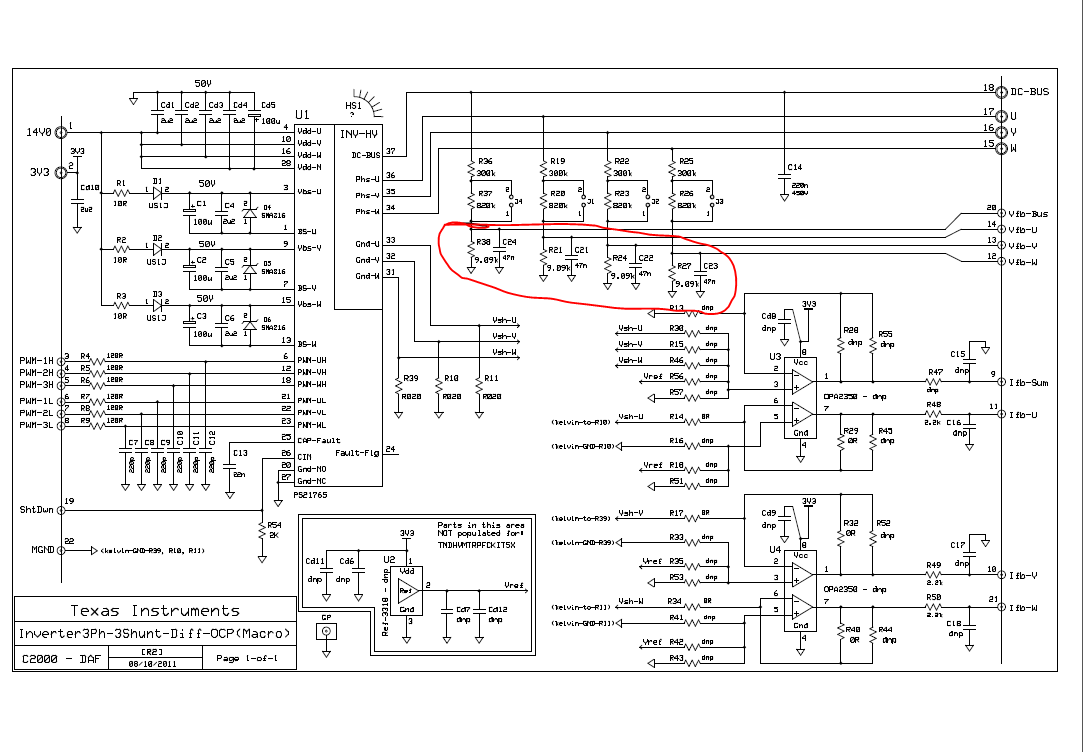
我的第一个想法是输出端的低通滤 波器(请参阅电路图)将频率限制为372,527Hz -这等于我的3极对电机上的最大值7450rpm。
是否有人知道 为什么 要将这些低通滤波器放置在这里? (屏幕截图3)
我希望您能帮助我解决我的"慢速"旋转电机问题。
提前感谢
Sebastian
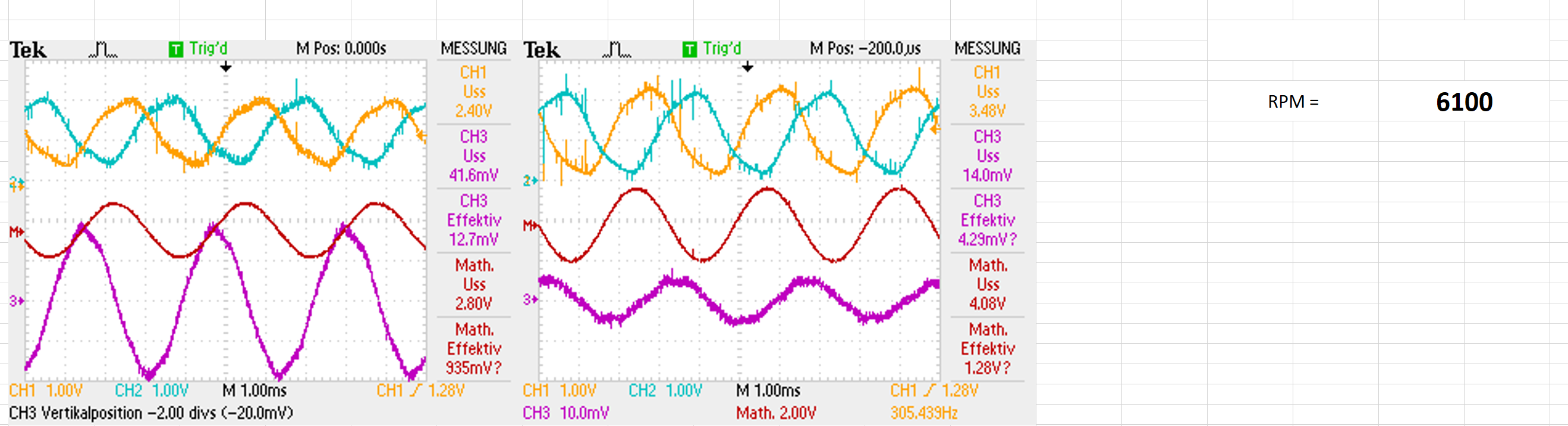
抓图1:
抓图2:
屏幕截图3:



{kind=link}