器件型号:LAUNCHXL-F28377S
工具/软件:Code Composer Studio
您好!
我对用于高性能 MCU 的 EtherCAT 接口参考设计有几个问题。 我已将 LAUNCHXL-F28377S launchpad 和 EtherCAT 背负式 FB1111-0141 (SPI)连接在一起、如 tidubq6.pdf、第5页、图6所述。 我的单核 Launchpad (LAUNCHXL-F28377S)和 tibubq6.pdf 的双核 Launchpad (LAUNCHXL-F28379d)均未输出 SPI_IRQ 和 EEPROM_LOADED 引脚的已加速 GPIO。 在对提供的示例 CCS 工程进行全面搜索后、我发现(如果我错了、请纠正我的错误)选择了使用 SPI_IRQ 引脚连接 GPIO78 (而不是 GPIO136)。 至于 EEPROM_LOADED 引脚、我还没有找到任何东西。 可以帮我解决这个问题吗?
-我使用的是 SPI 通信模式。
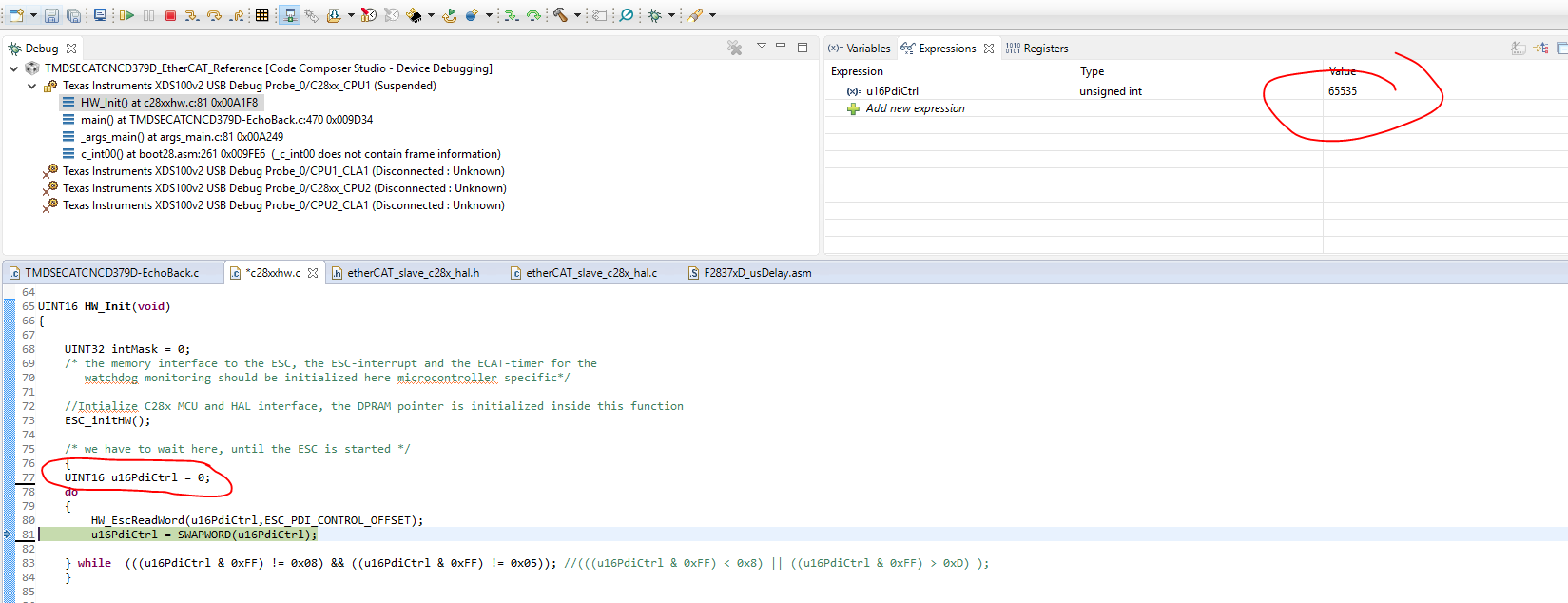
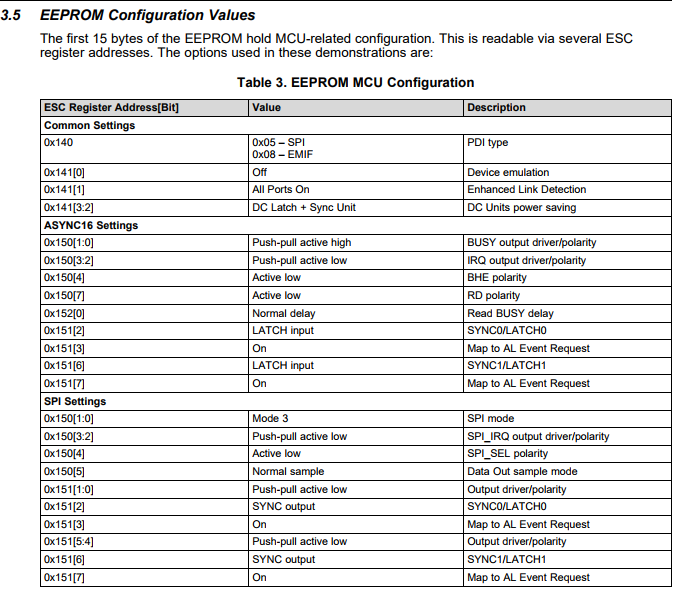
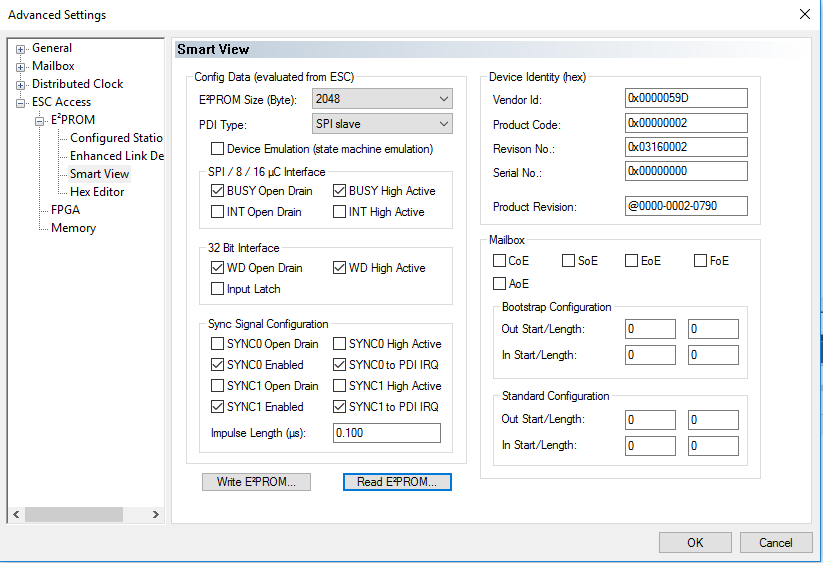
我还遵循了有关 TwinCAT3的指令、但当我最终对 EEPROM 进行编程时(为了对 EEPROM 进行编程、我使用了 tidcc35.zip 中包含的 pdi_test_app_spi.bin、该可从参考设计页面下载。 首先,我用该文件编写了 EEPROM,然后我读取了 EEPROM),我遇到了2个问题。 第一个问题是、如果我关闭 SmartView 窗口并再次打开它、那么它似乎处于初始状态、我不知道我是否做了任何错误。 第二个问题是、无论我尝试什么、 EtherCAT 回扫 FB1111-0141都不会切换到工作状态。 我出了什么问题? 提供了使用提供的 bin (SPI)文件写入 EEPROM、然后读取 EEPROM (保存)后的 SmartView 选项卡。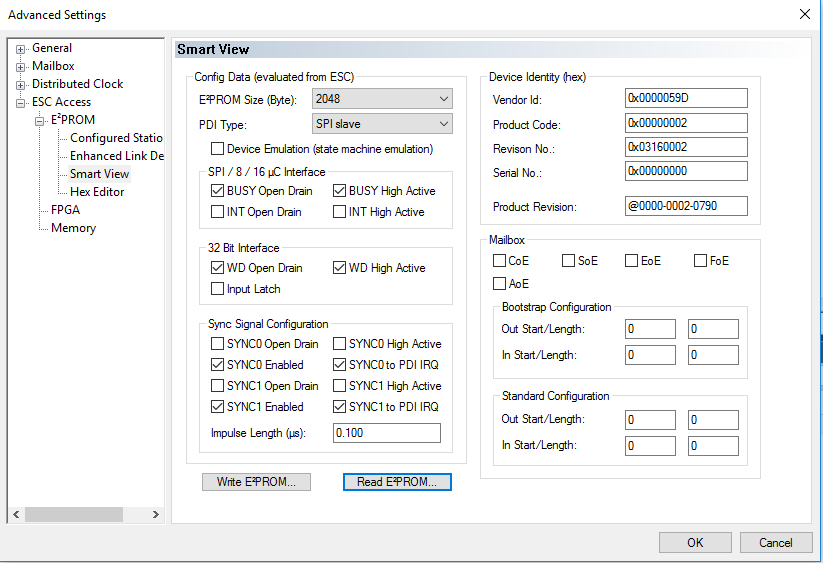
在运行 CCS 工程之前、我是否需要切换到 TwinCAT 的运行模式?
谢谢、
Stamatis Athiniotis