

Other Parts Discussed in Thread: MOTORWARE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28069F 主题中讨论的其他器件:MOTORWARE
尊敬的 TI 成员:
我想根据 motorware 调整自定义代码的速度 PID 参数。
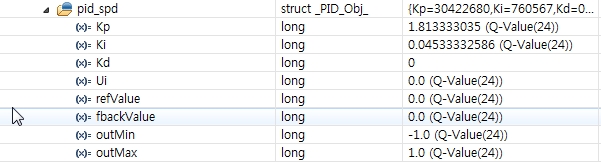
我在 CTRL_setParams()处更改了 Kp 和 Ki,如下所示
//设置默认速度 PID 控制器参数 // Kp =_iq (0.02*pUserParams->maxCurrent *pUserParams->iqFullScaleFreq_Hz/pUserParams->iqFullPereParams->iq+iQFullPareUserParams->iQUPerpParams->iQ1ruleUserParams->iQ/2>IqParpFullParams->IqParams->IqUserParpFullParams->IqParpFullParams->IqUPerpFullParams->IqPareUserParams->IqUr; // outMax =_IQ (1.0); PID_setGains (obj->pidHandle_spd、Kp、Ki、Kd); PID_setUi (obj->pidHandle_spd、_Iq (0.0)); PID_setMinMax (obj->pidHandle_spd、outMin、outMax);KP_setHandle_Kd 、CTRL_Handle、Kd、Cd、Cd 类型;PID_Handle、Cd (Cd)
我可以看到 KP 和 KI 在开始时就像我在拍摄后所想的那样受到了升级。

在我运行电机后、它恢复为原始值。
我找不到哪个代码更新了 Kp、Ki 值。
因此、我无法测试速度 PID 的可调参数。
请问如何更新速度 PID 的 Kp、Ki 值?
提前感谢
