请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8301-HC-C2-KIT
我使用 lab13b 来旋转8极对机器、主要是因为它具有编码器反馈功能。 我不是软件工程师、因此我不知道如何使用 FOC 实验室实现位置传感器。 我只需要旋转<500 RPM、但我需要生成最大扭矩。
使用库存 EVM 配置(PCB 和 user.h 缩放)、峰值相电流峰值在~30安培时达到峰值、 EXT_IX-FB 等于1.2伏(对于30A)。 我的 USER_MOTOR_MAX_CURRENT = 40、因此我不知道为什么电流在30安培时达到峰值? 示波器跟踪。

我将 Rsense (R80、R81、R82)更改为0.001Ω Ω、以为峰值电流提供更大的裕度(我需要在70-80安培时才能达到)。 我还更改了 user.h 中的比例
USER_IQ_FULL_SCALE_CURRENT_A (82.5)
USER_ADC_FULL_SCALE_CURRENT_A (165)
USER_MOTOR_MAX_CURRENT (80.0)
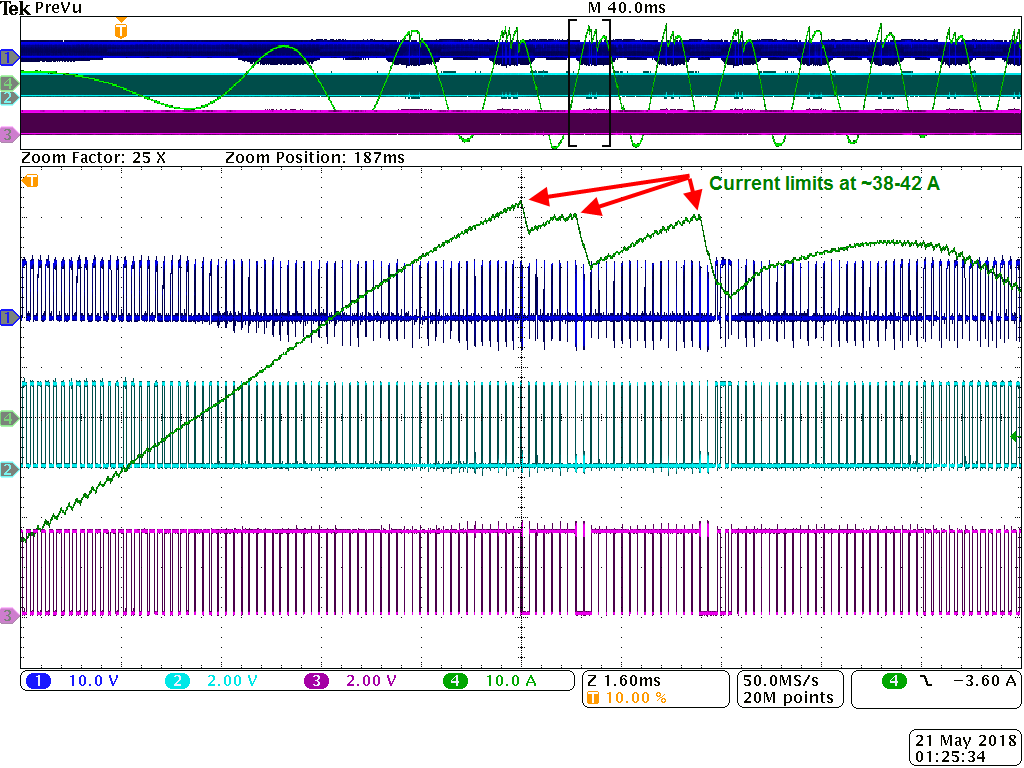
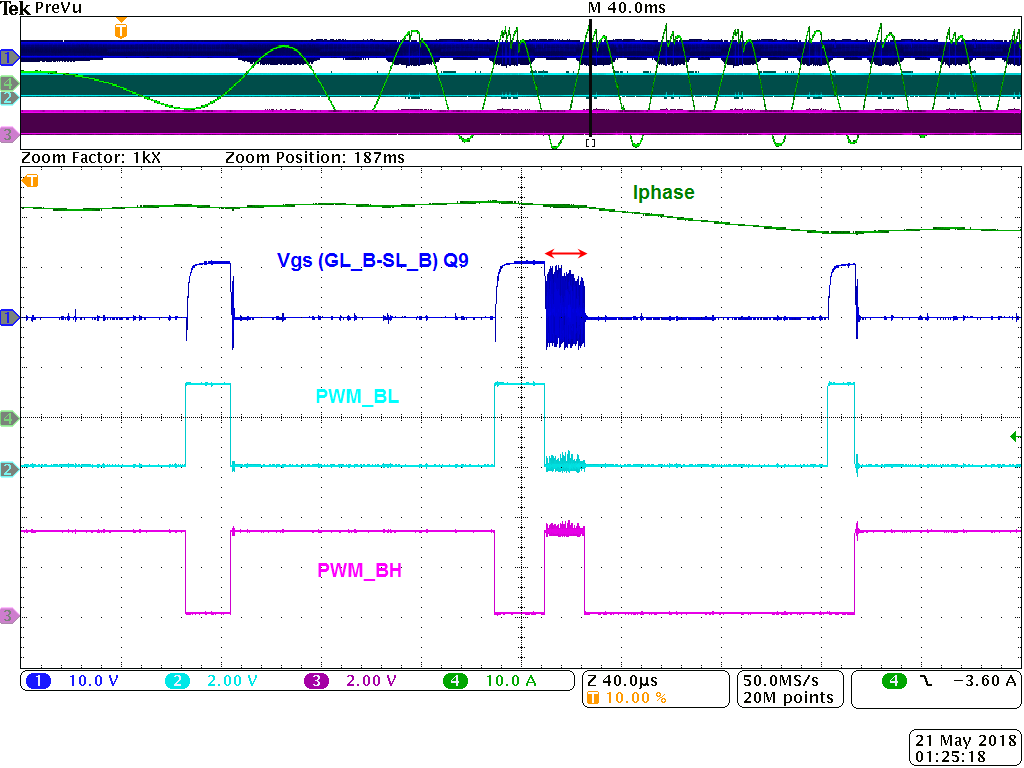
现在、当需要高转矩时、峰值相电流限制为~40安培、EXT_IX-FB 等于0.78伏(对于40A)。 为什么不允许电流上升到80安培? 是否有其他参数限制电流? 我没有接近满量程(1.65伏)的地方。