请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28335 您好!
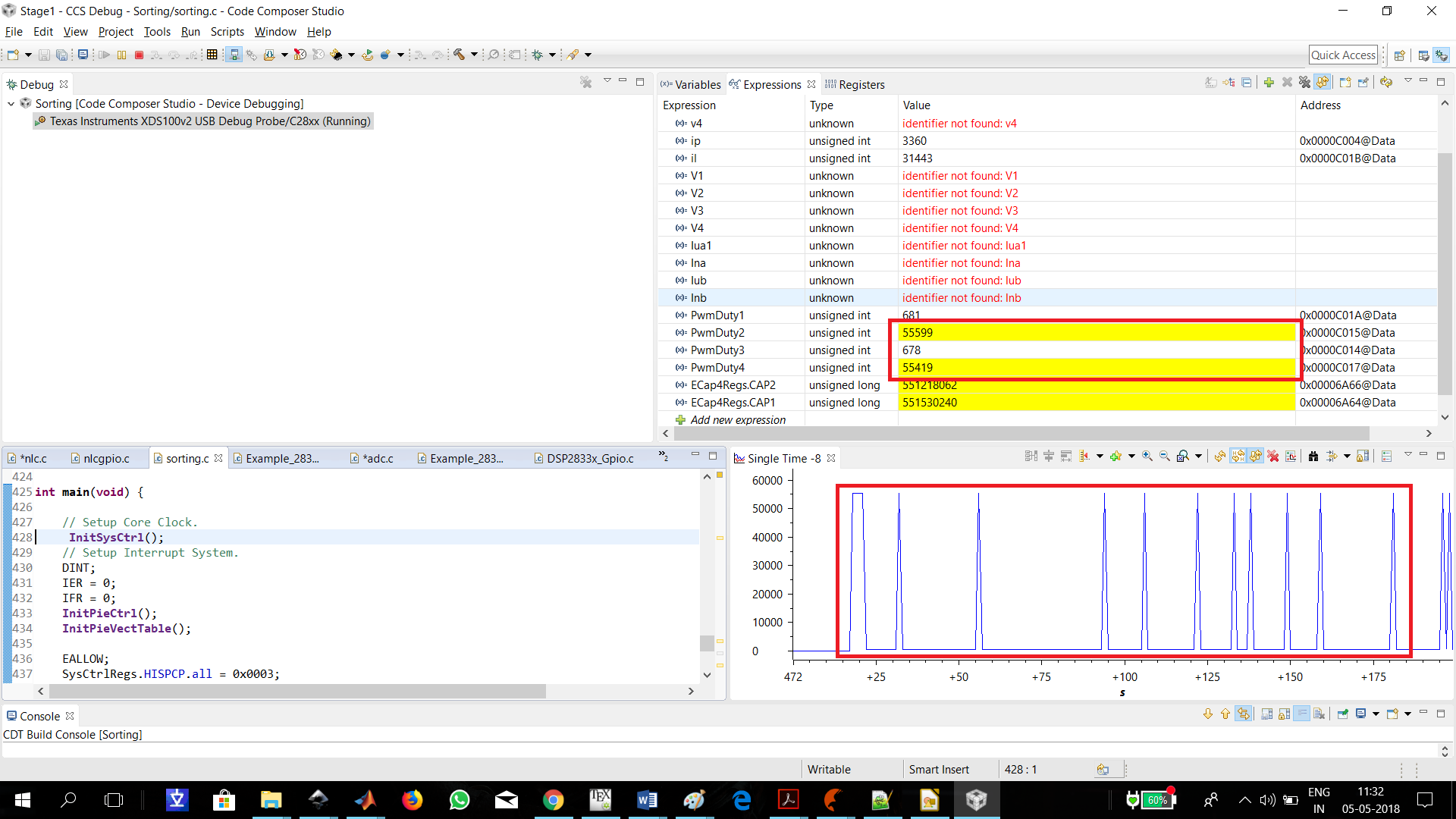
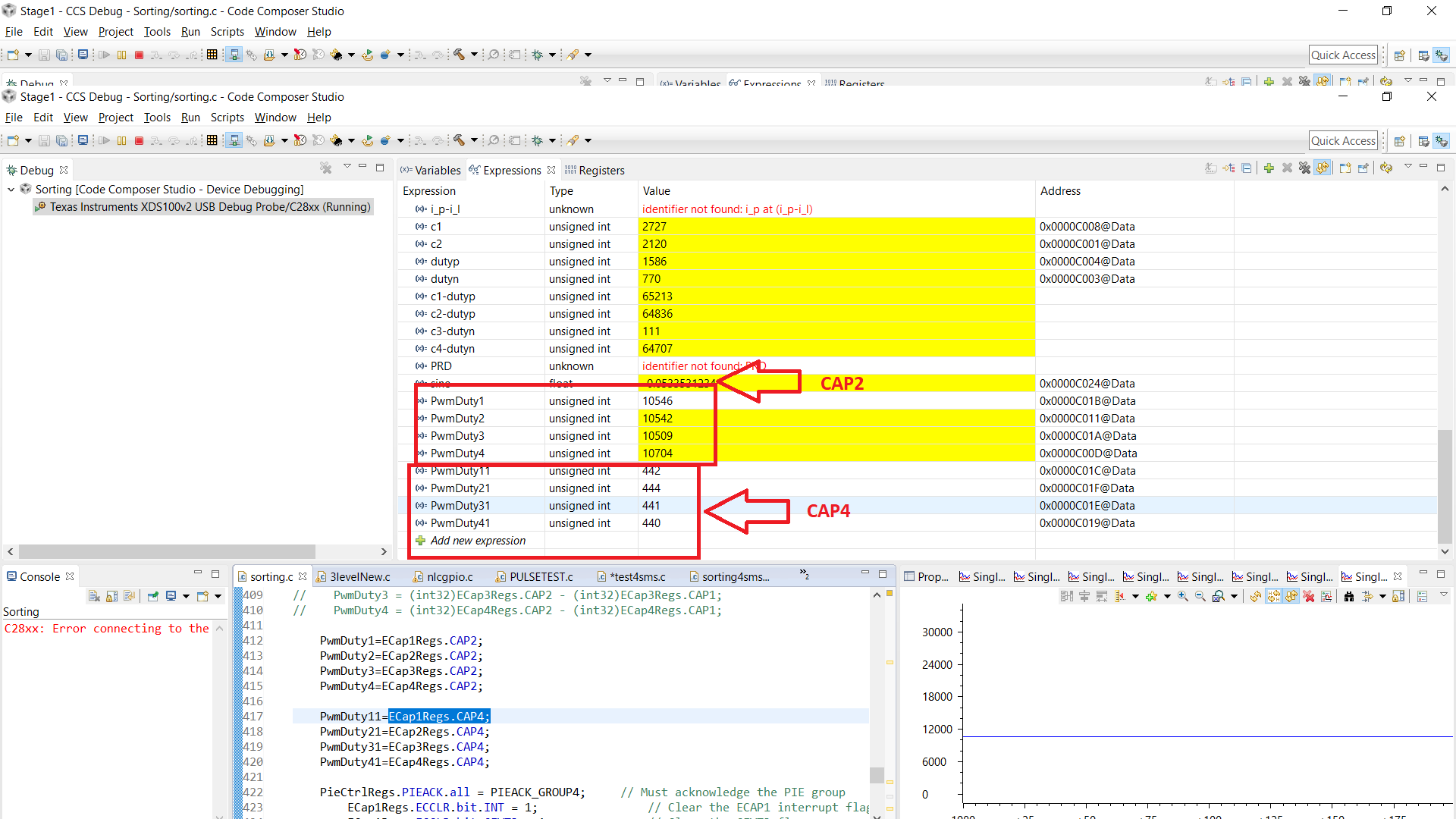
我想计算八 个 不同占空比的方波(30kHz)的平均值。 我想从8个 GPIO 引脚读取8个信号、我必须计算这些方波的平均值以进行比较。 我将 GPIO 引脚设置为输入、但您能告诉我如何通过数字滤波器或其他方法找到30kHz 和3.3v 幅度方波信号的平均值吗?
注意:我在计时器中断函数中使用平均值进行比较。
谢谢、
您好!
我想计算八 个 不同占空比的方波(30kHz)的平均值。 我想从8个 GPIO 引脚读取8个信号、我必须计算这些方波的平均值以进行比较。 我将 GPIO 引脚设置为输入、但您能告诉我如何通过数字滤波器或其他方法找到30kHz 和3.3v 幅度方波信号的平均值吗?
注意:我在计时器中断函数中使用平均值进行比较。
谢谢、