

主题中讨论的其他器件:MOTORWARE
您好!
我在带负载移动电机时遇到一些问题。
我已经执行了无问题的识别
#define USER_MOTOR_TYPE MOTOR_Type_PM
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_RR (空)
//#define USER_MOTOR_Rs (0.076525)
#define USER_MOTOR_Rs (0.04565098)
#define USER_MOTOR_LS_d (0.0002467314)
#define USER_MOTOR_LS_q (0.0002467314)
#define USER_MOTOR_Rated 磁通(0.107993)
#define USER_MOTOR_磁 化电流(空)
#define USER_MOTOR_RES_EST_CURRENT (6.0)
#define USER_MOTOR_IND_EST_CURRENT (-2.0)
#define USER_MOTOR_MAX_CURRENT (40)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (13.0)
电机参数为:
额定功率:320W
额定转速:3220rpm
Vnom = 24V
标称值= 16.7A
Ke = 4.25V/KRPM
极点= 4
我对推断出的 Kt (3/2*PolePairs*RatedFlux[V/Hz]/2*PI)有一些疑问。 如果使用适当的单位(例如 V/[rad/s])、则 Ke 和 Kt 应相同。 不是?
如何验证估算的额定磁通是否正确? 给出错误的额定磁通的选择是什么?
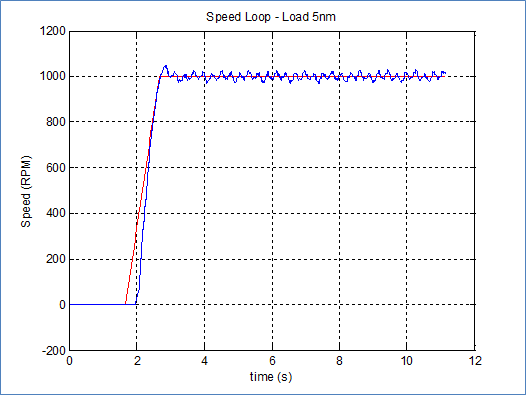
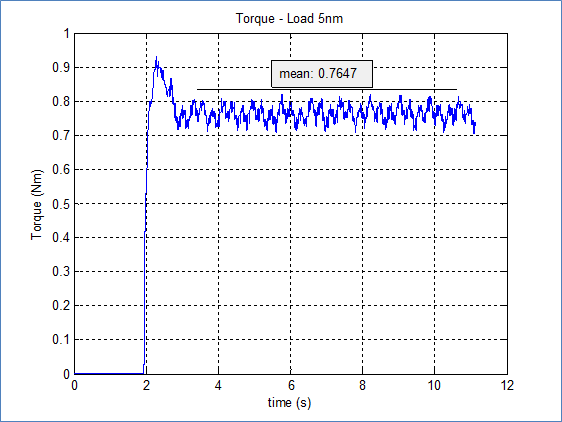
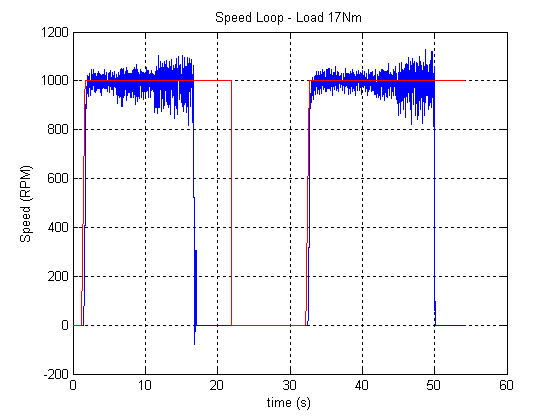
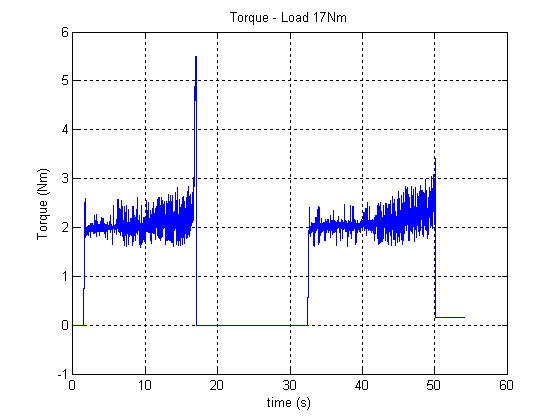
我已将电机连接到另一个电机以模拟负载。 "负载电机"具有扭矩控制、速度限制固定为0。
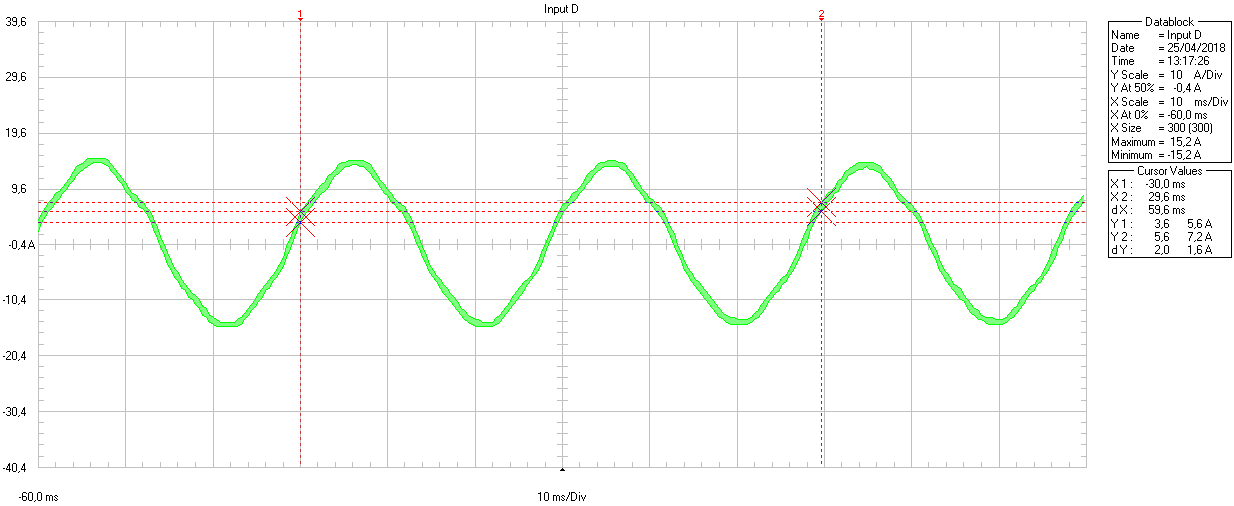
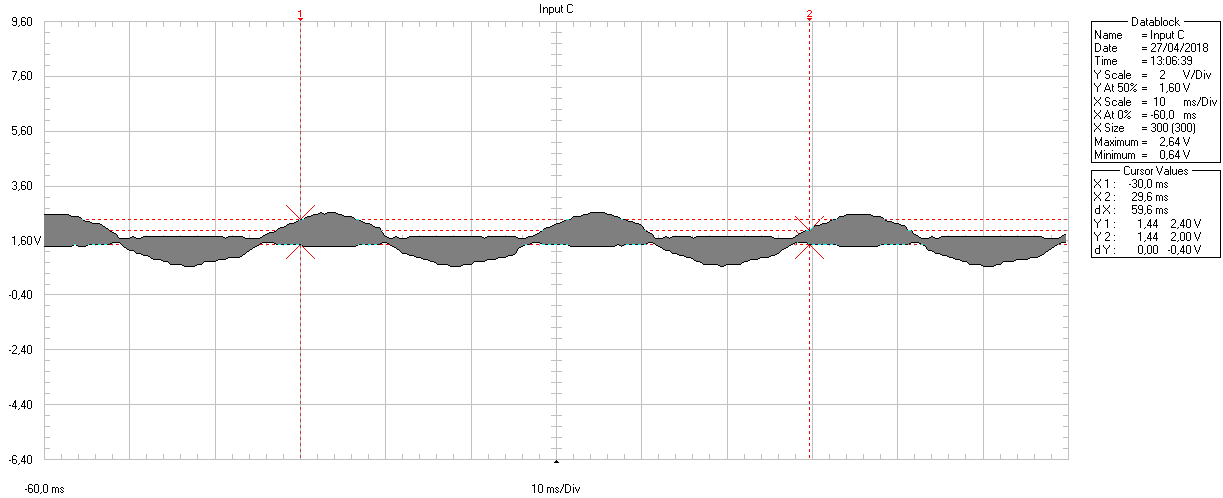
一旦 I 电阻扭矩增大、电路板和电机消耗的电流就会相当高。 50%中有更多 的是浪费掉的。
¿此问题是否与不正确的识别有关?
提前感谢您
Borja Gómez í a


{kind=link}