

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280049 主题中讨论的其他器件:C2000WARE
各位专家、您好!
我正在测试以下示例代码。
C:\ti\c2000Ware_1_00_05_00\device_support\f2837xd\examples\cpu1\HRPWM_duland_SFO_v8\cpu01\HRPWM_duland_SFO_v8.c
由于这是 F2837x 的代码、我修改了 F280049的以下函数。
InitEPwm1Gpio();
InitEPwm2Gpio();
下面是 PWM1A 和 PWM2A 的图片。 结合周期扫描、PWM1和 PWM2之间的相位发生变化。

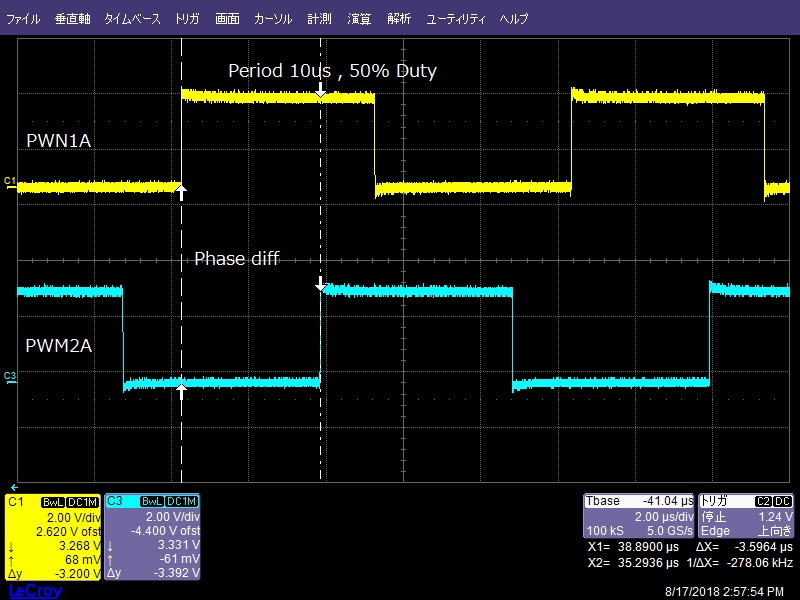
源代码集的更新阶段似乎始终是新周期的一半、但看起来不是这样。 如果将 InputPeriodInc 参数设置为零、则相位是固定的。 我希望即使在周期发生变化时也将相位固定在120度。
是否需要此行为? 或者、我是否错过了什么?
此致、
Uchikoshi
