Other Parts Discussed in Thread: C2000WARE-DIGITALPOWER-SDK, AMC1301, AMC1311
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDM-1000 主题中讨论的其他器件:C2000WARE-DIGITALPOWER-SDK、 AMC1301、 AMC1311
工具/软件:Code Composer Studio
您好!
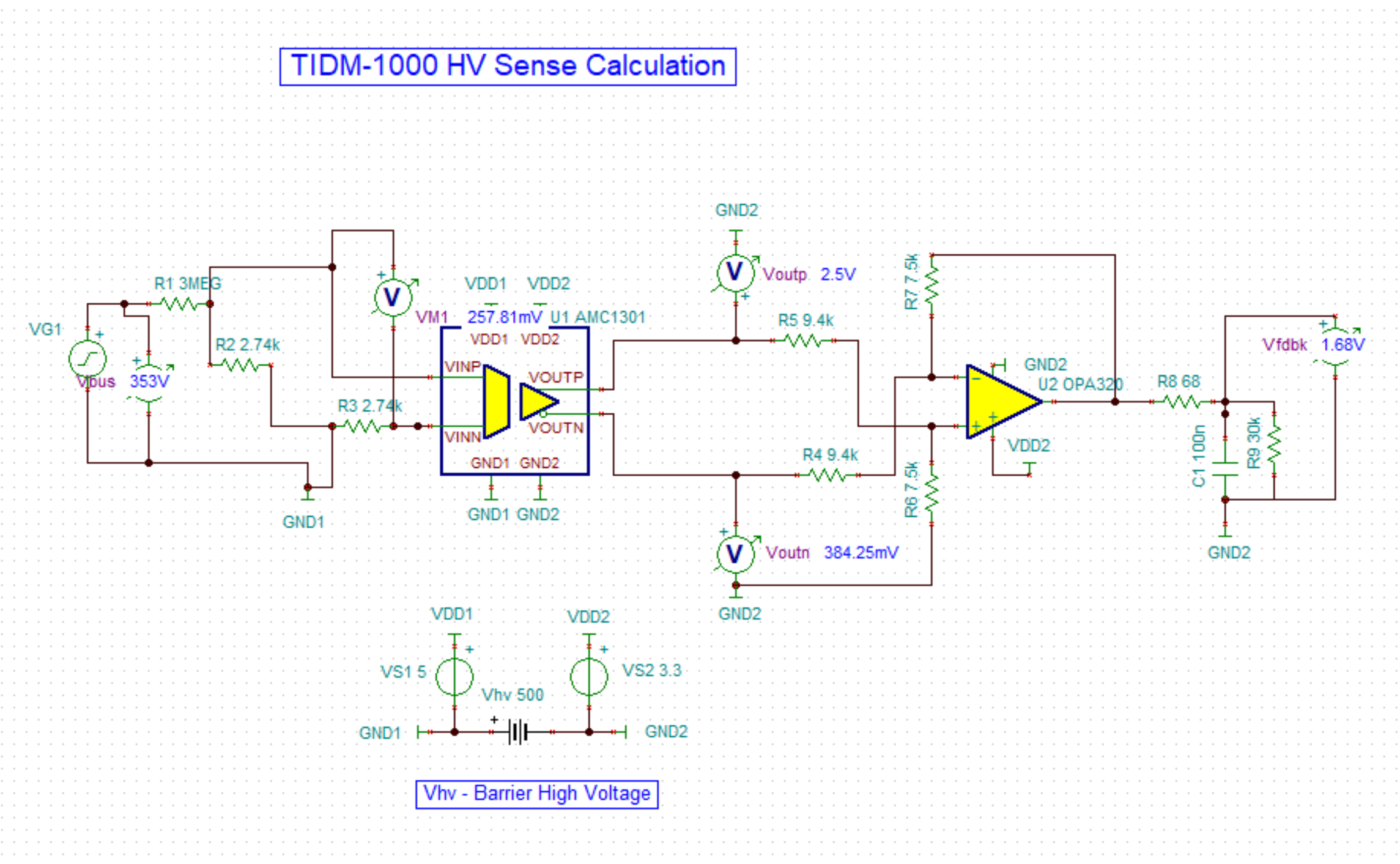
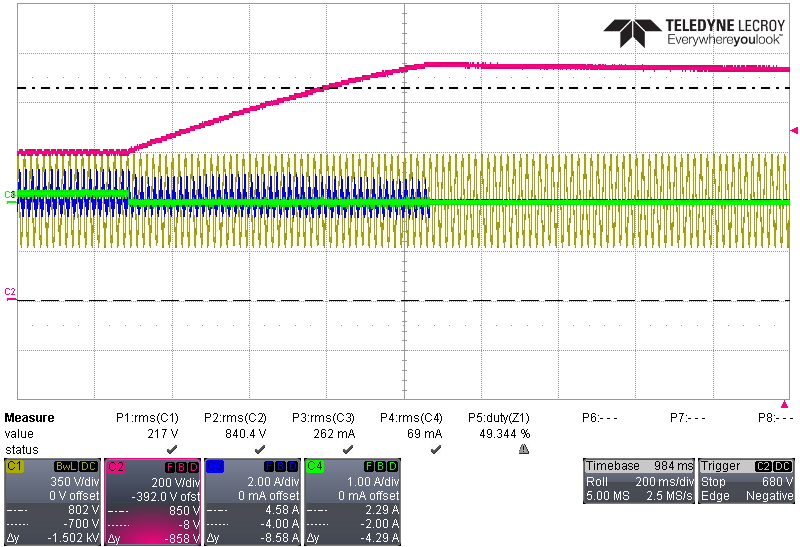
我目前正在运行三相 Vienna PFC 解决方案、并希望校准总线电压。 使用 BusMeasurationRoutine Excel 文档、我输入了我测得的总线电压和 GUI 测量值、并运行了回归分析。 我不确定 接下来应该做什么。 用户指南中没有太多关于校准的信息。 我假设我使用回归分析生成的 Intercept 和 X 变量、只是不确定如何更改解决方案中的偏移和增益。
此致、
Luke Nicholson