

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28034 希望使用 CAN 超时功能、并以250kbps 的速率监控 CAN 消息的接收情况
ECANaMOTOREGS.MOTO16为2500、表示10ms
ECANaMOTSRegs.MOTS16为5000、表示20ms
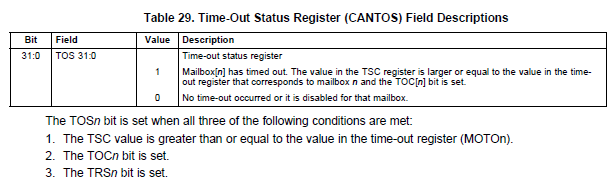
设置 ECanaShade_s.CANTOC.bit.TOC16
但 ECANaRegs.CANtos.bit.TOS16会稳定复位
会发生什么情况?
在接收上下文中、ECANaShade_s.CANTRS.bit.TRS16的功能是什么?
我们是否有这方面的示例代码?
此致、Bernd
