

大家好、
我的客户使用 F280025C 进行电机控制、使用 FAST 观测器在自己的电路板上进行电机控制、 识别的电机参数可用于计算正确的 Ls、Rs。在速度环路控制模式下、电机的运行频率远低于1200Hz (电速)、输入电压约为40V、 但一旦超过1200Hz、电机控制将不稳定并会导致过流。 当电机转速超过1200Hz 时、电流波形如下所示。

为了找出根本原因、请使用不带速度环路和电流环路的快速角度和开环控制、即设置 VQ 以旋转电机、并使用快速角度进行克拉克和帕克变换、
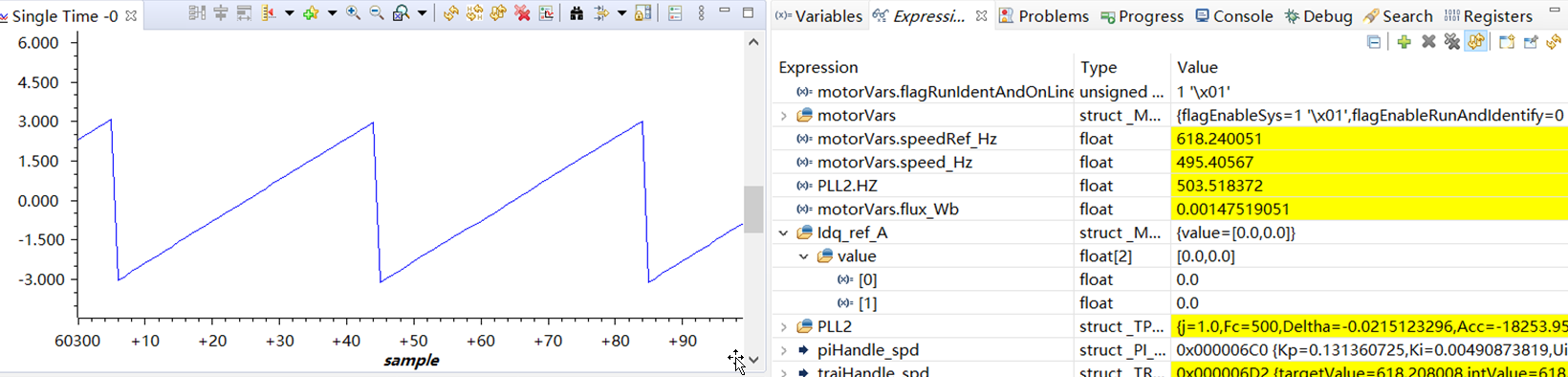
下面是使用 F280025C 时500Hz 下快速角的波形、这很好。
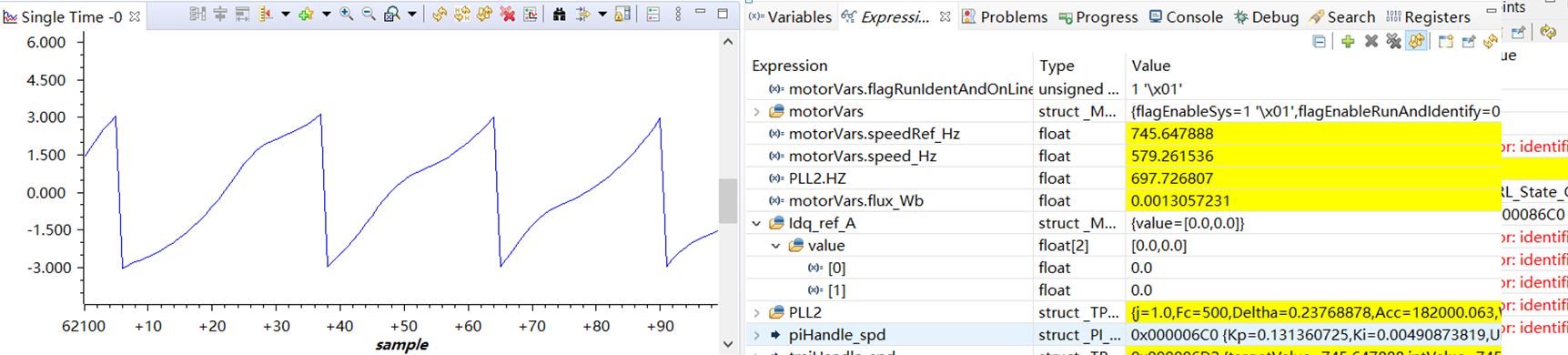
当速度达到750Hz 时、快速角的波形不好、并且有失真。
当速度达到980Hz 时、快速角的波形具有更多的失真、当速度超过1200Hz 时将变为过流。

但是、客户 也曾经设计 F28027F 电路板、并且具有相同的硬件参数和软件参数、F28027F FAST 可在1500Hz 以上运行、在同一开环模式下工作时、FAST 角度看起来大约为1KHz、如下所示。

F280025C 和 F28027F 电路板都使用相同的硬件参数:
|
28027F |
280025C |
|
电流采样:3电阻采样 |
电流采样:3电阻采样 |
|
基相电流:±330A |
基相电流:±330A |
|
基相电压:68.14V |
基相电压:68.14V |
|
相位电压滤波器截止频率:389Hz |
相位电压滤波器截止频率:389Hz |
|
驱动器 IC 编号:3. |
驱动器 IC 编号:1 |
|
布局:一个包含控制和电源电路的电路板 |
布局:用于控制和电源电路的两个独立电路板 |
问题是:
1.导致 F280025C 无法在1200Hz 等高速下控制和快速角度变得不精确的任何可能原因? 客户的目标是实现1500Hz 或更高的频率。
2.我们是否在超过1.5KHz 的高速下快速测试了 F280025C?
