请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TIDM-02007 主题中讨论的其他器件: LAUNCHXL-F28379D、 BOOSTXL-3PHGANINV、 LAUNCHXL-F280025C
我正在尝试遵循 参考设计: TIDM-02007参考设计 来控制我的 PMSM 电机。 将项目编译到 FCL_Level2、而不使用编码器(目前)。
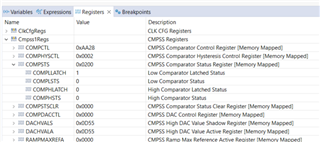
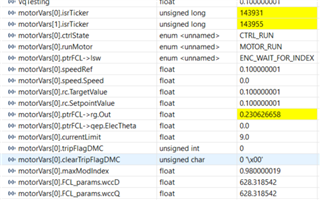
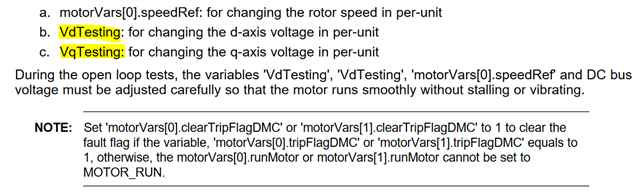
设计中推荐的电机(Teknic M-2310P-LN-04K)符合预期、但当我切换到电机时、我将进入某种保护模式、该模式会阻止电机旋转。 它看起来像是 tripFlagDMC == 1、这是过流的。 我没有在我的电机中看到或测量任何高电流。
除了 TIDM-02007文档外是否有 其他指南或其他人可帮助我针对其他 PMSM 电机调整此参考工程?
谢谢。