Other Parts Discussed in Thread: SYSCONFIG
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280025C 主题中讨论的其他器件:SysConfig
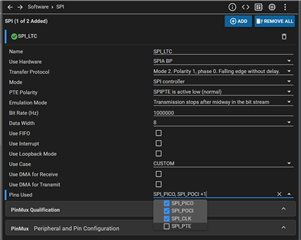
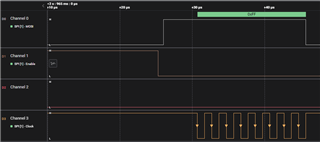
我 使用 SysConfig 在3引脚模式下配置了 SPI。 我选择了用例作为定制、并仅使用了 POCI、PICO 和 CLK 引脚。 不过、当我手动将 CS 引脚设置为低电平、并使用任何 driverlib 函数读取或写入 SPI 数据时、会有一个初始时钟脉冲使数据读取错误。 此脉冲也会出现在4引脚模式下、但在该模式下、CS 引脚仅在初始脉冲结束后才会被拉低。 我如何阻止这种情况发生?
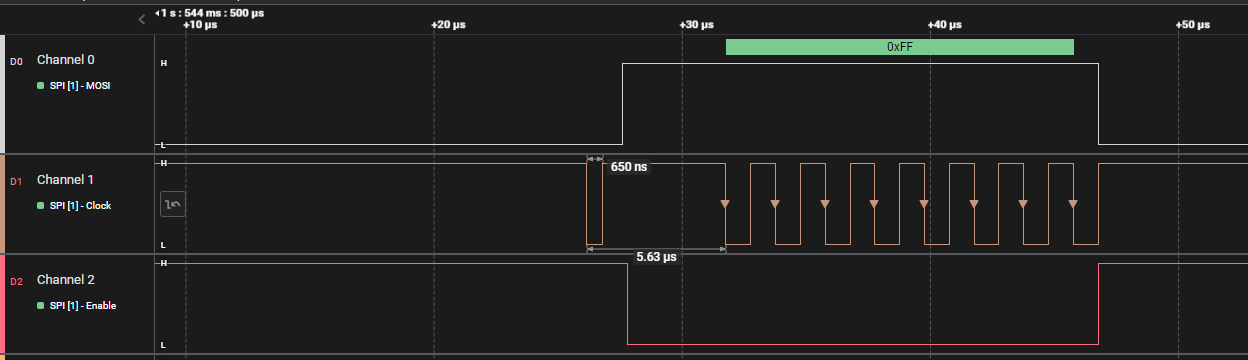
4引脚模式
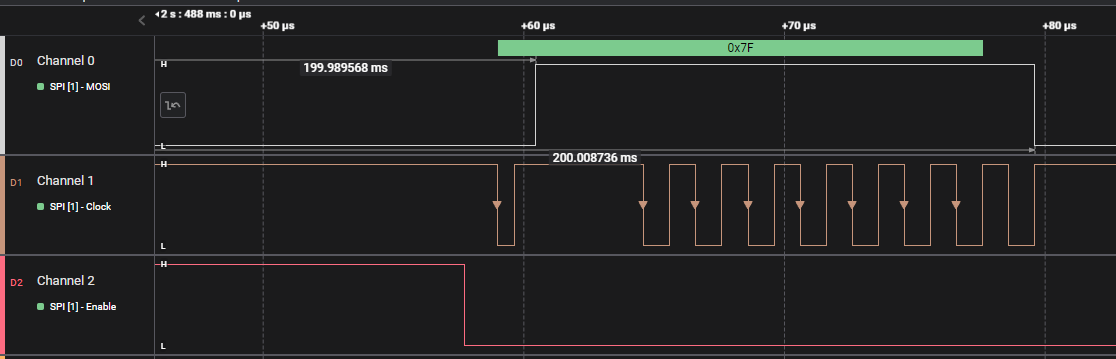
3引脚模式