您好、我继续我的上一篇文章、因为我看不到那里的回复选项。 我几天都不在,不能回复最后一个问题,它现在被锁定了。 现在、我附加最后一个主题以继续。
TMS320F28335:TMS320F28335:PID 仿真(DCL)- C2000微控制器论坛- C2000 ︎ 微控制器- TI E2E 支持论坛

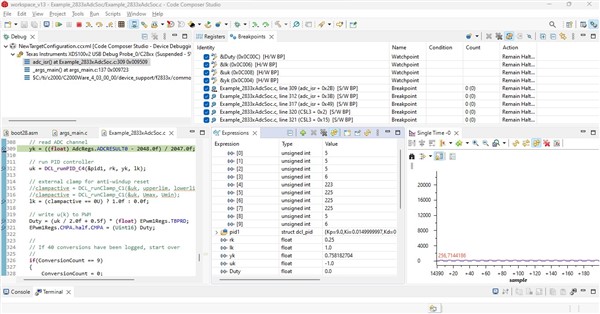
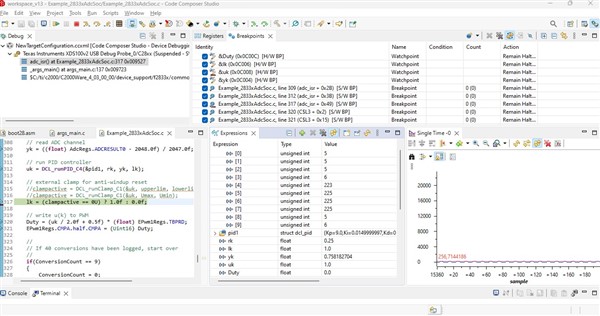
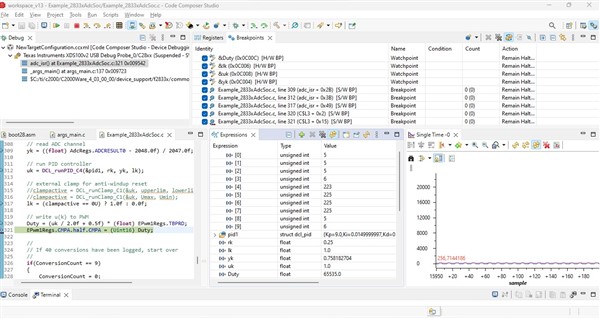
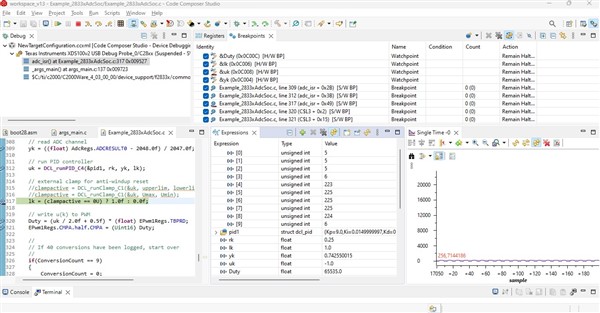
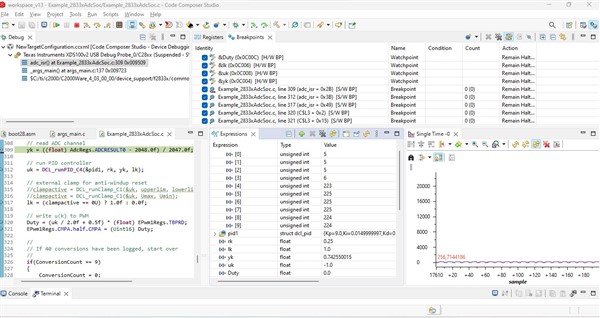
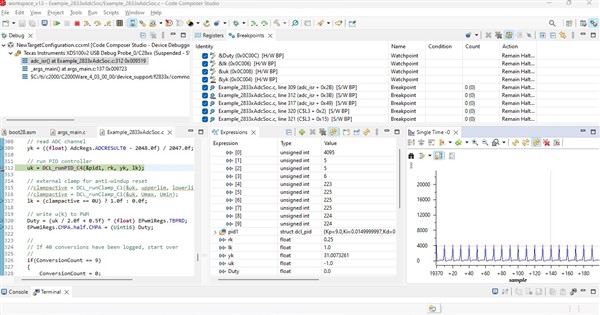
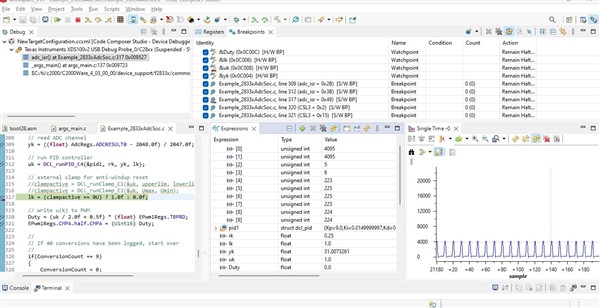
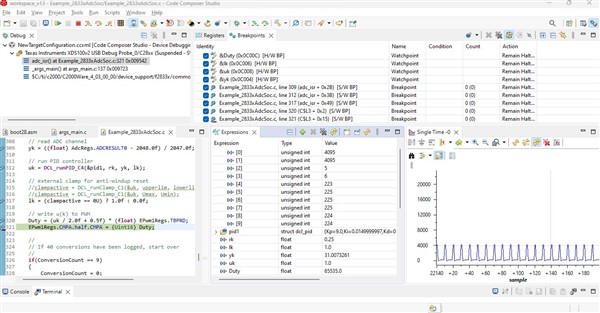
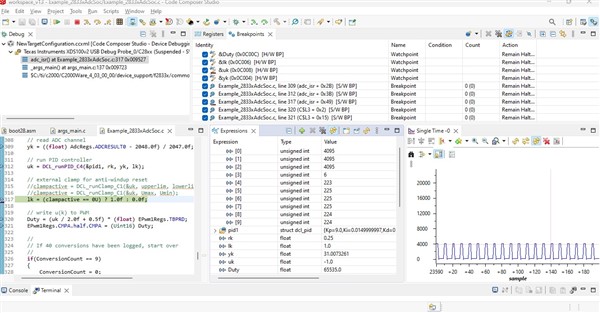
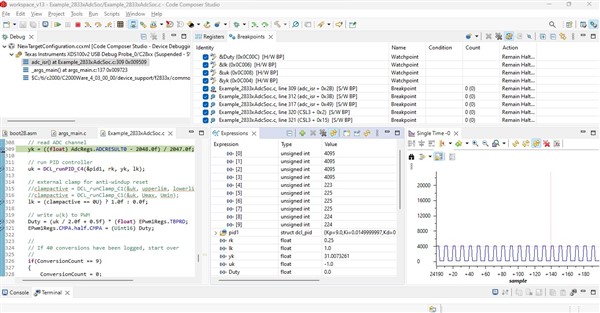
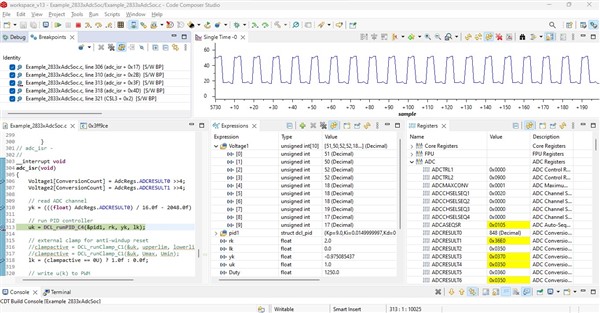
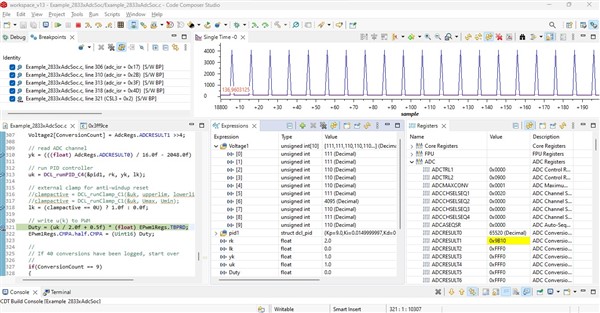
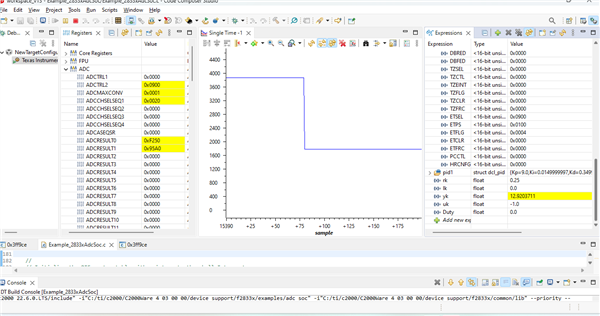
我担心的是,YD 远远超出了+/-1的范围,它在图 5上显示12.9f,应该不是这样的。 如果我们 快速计算、P 路径的控制力度将是 ABS (YK - RK)* KP =(12.9 - 0.25)* 9 = 113.85、这个值会被钳位到1。
问题1:
在这里、我看到 QD 为0、而 QD 为1.2V 时的为12.9。 如果 ADC 值为0 且电压为0V、则必须钳位至+/-1;如果 ADC 值为4095且电压为3V、则必须钳位至如图所示的极值。 之前的回复说明 KP =9处的控制器反应过度,并显示最大的控制力度。 我想确认是否应该 将 KP 或其他控制参数设置为使 KD =+/-1? 您可以看一下 DCL 指南示例3、4和5。 RK 可以更改、英国可以更改、QD 必须介于-1和+1之间。 我应该做哪些更改才能将其保持 在+1和-1之间?
目前、您是否有任何反馈机制 允许 使用占空比并影响 ADC 输入? 如果没有任何反馈、 PID 控制器将永远无法达到目标电压、且其 I 路径最终会使反馈达到饱和。 如果 无法持续施加输入影响、控制器最终会在达到目标值时稳定在0%。 要让控制器 不断提供控制措施、唯一方法是 从不断施加影响开始。
问题2:
我 正在实施此电路、如下图所示。 在降压转换器物理设备模型中、输入 Vin 为20V 直流、输出 Vout 为10V 恒定直流。 但在这里、我 将 针对我的测试将上述受控体模型与反馈部分分离、然后从外部电源提供0-3V 直流输出。 反馈部分将生成一个具有栅极晶体管(栅极驱动器)占空比的 EPWM 信号。 正如我之前说过的、我将删除上述 Buck 受控体模型、然后检查此变化的 占空比 0-3V 直流电源通过示波器测量电压和电流 。 在这里、我可以更改输出的电源值、如0V、1V、1.5V、2V 等 、并将看到相应的影响占空比。 现在是否有必要将工厂模型与反馈零件连接起来、以进行具有 PID 机制的初始设置? 在此设置中、如果没有工厂模型 、但仅使用外部电源0-3V、然后检查硬件上的仿真、PID 是否能够达到目标值(Vref 值)?

如果只需要基于 ADC 读数的成比例占空比、 则不需要 PID 来实现、直接将 ADC 读数分配到占空比寄存器就足够了、前提是不会对系统产生外部影响。
问题3:
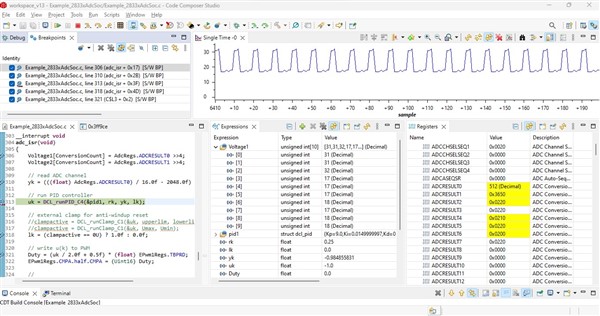
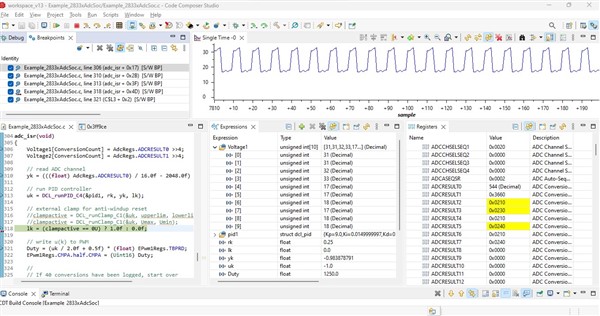
在这 种情况下、 我 需要在 ADC 与占空比之间生成公式/关系、其中 ADC 分别具有两个极端值0 (0V)和4095 (3V)以及占空比0和100%。 如果任何此类值达到1.2V 或1638数字值、则中间的占空比约为45%或40%。 可以在我的代码中实现此公式、但 问题是、如果在启动降压转换器装置模型时输出变为高电平、并且您需要稳定在一个值、则不存在钳位/饱和或抗饱和复位设置。 这就是我使用 PID 的原因、它可以控制输出、并稳定在一个相对于参考/设置值 Vref 的值。
uK/2.0f + 0.5f 是尝试将控制输出范围从-1.0~1.0f 标准化为0~1.0f、表示占空比的0%至100%。
问题4:
~是什么意思? 是否意味着-1到+1? 以及它如何等于0 ~ 1? 正如我所知道的这个公式 YK=((float) AdcRegs.ADCRESULT0 - 2048.0f)/ 2047.0f;它给出介于-1到+1之间的 Yk 值? 那么、它如何等于0 ~ 1?
问题5
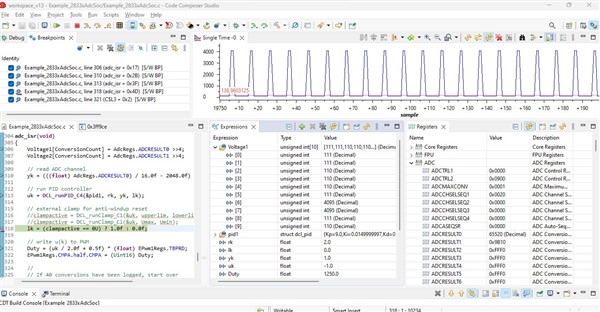
我在这里附加了一个代码。 如您之前所说、使用此程序时、占空比将不会是中间值、使用 PID 控制器时、占空比将是0%或100%。 我在 DCL 指南示例3、4和5中注意到了一件事。 LK 始终为1.0而非0。 但在本例中、它始终保持为0。 为什么?
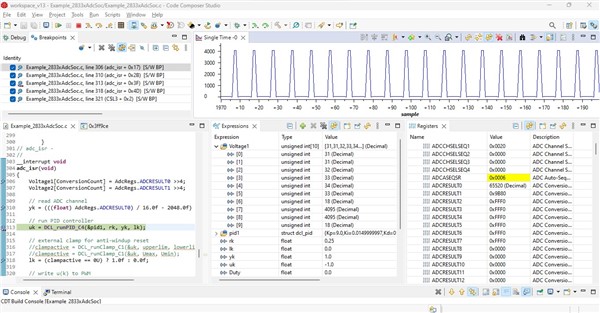
0V 时、占空比为65535.0
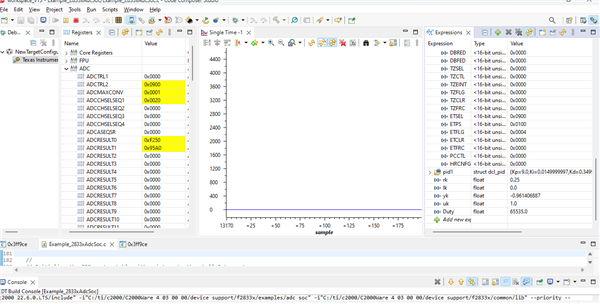
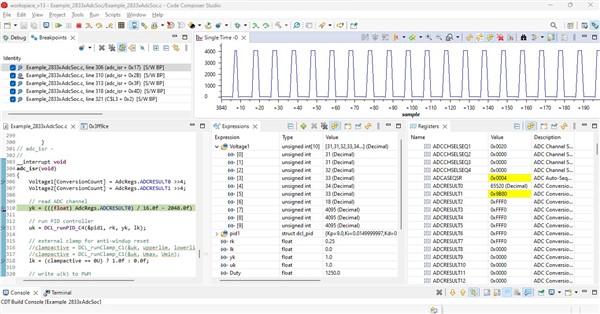
在3V 时、占空比为0
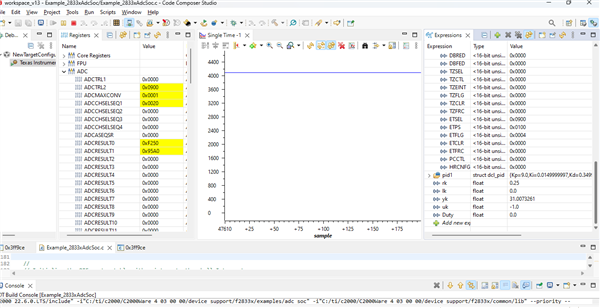
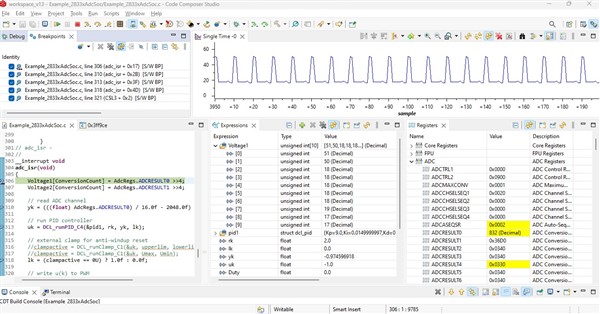
在1.2V 时、占空比为 0.
请相应地提出上述问题的答案。
谢谢
此致
阿尔萨兰