请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280049C 主题中讨论的其他器件:C2000WARE、 DRV8311、 DRV8376、DRV8316
工具与软件:
您好!
我已经在这方面工作了一段时间,我真的很困倦,所以任何帮助都会被感激!
我有一个代码可以与具有16位 SPI 帧的 DRV 器件通信、我正在尝试更改此代码、以便可以与具有24位 SPI 帧的另一个 DRV 器件通信。
以下是我之前尝试转换的 SPI 帧的当前代码:
void Config_evm_spi(void)
{
//Pin Config
EALLOW;
// SPI_MOSI
GPIO_SetupPinOptions(16, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
// SPI_MISO
GPIO_SetupPinOptions(17, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
// SPI_CS
GPIO_SetupPinOptions(56, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
// SPI_CLK
GPIO_SetupPinOptions(57, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
GPIO_SetupPinMux(16, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(17, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(56, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(57, GPIO_MUX_CPU1, 1);
EDIS;
EALLOW;
ClkCfgRegs.LOSPCP.all = 0;
EDIS;
// Initialize SPI FIFO registers
SpiaRegs.SPIFFTX.all=0xE040;
SpiaRegs.SPIFFRX.all=0x2044;
SpiaRegs.SPIFFCT.all=0x0;
//SPI Settings
SpiaRegs.SPICCR.bit.SPISWRESET = 0; //SPI Reset On
SpiaRegs.SPICCR.bit.CLKPOLARITY = 0; //SCLK Active High
SpiaRegs.SPICCR.bit.SPICHAR = 0xF; //16-bit SPI char
SpiaRegs.SPICCR.bit.SPILBK = 0;
SpiaRegs.SPICTL.bit.OVERRUNINTENA = 0; //No overrun interrupt
SpiaRegs.SPICTL.bit.CLK_PHASE = 0; //Phase 0
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1; //Master mode
SpiaRegs.SPICTL.bit.TALK = 1; //nSCS enabled
SpiaRegs.SPICTL.bit.SPIINTENA = 0; //TX/RX Interrupt Disabled
SpiaRegs.SPIBRR.bit.SPI_BIT_RATE = ((25000000 / 1000000) - 1); //Set baud rate to 1MHz
SpiaRegs.SPIPRI.bit.FREE = 1; //Set so breakpoints don't disturb transmission
SpiaRegs.SPICCR.bit.SPISWRESET = 1; //Exit SPI reset
}
Uint16 spi_xmit(Uint16 spiFrame)
{
SpiaRegs.SPITXBUF=spiFrame;
//Wait for RX flag to indicate SPI frame completion
while(SpiaRegs.SPIFFRX.bit.RXFFST != 1)
{
}
return SpiaRegs.SPIRXBUF;
}
Uint16 spi_read(Uint16 addr)
{
Uint16 commandword = 0;
uint16_t p_addr = addr;
uint16_t p_data = 0;
uint16_t calc = ((p_addr << 9) & 0x7E00) | (p_data & 0x00FF);
uint16_t parity = 0;
while(calc)
{
parity ^= (calc & 1);
calc >>= 1;
}
commandword = (0x8000 | (addr << 9) | (parity << 8));
return spi_xmit(commandword);
}
Uint16 spi_write(Uint16 addr, Uint16 data)
{
Uint16 commandword = 0;
uint16_t p_addr = addr;
uint16_t p_data = data;
uint16_t calc = ((p_addr << 9) & 0x7E00) | (p_data & 0x00FF);
uint16_t parity = 0;
while(calc)
{
parity ^= (calc & 1);
calc >>= 1;
}
commandword = ((addr << 9) | (parity << 8) | data);
return spi_xmit(commandword);
}
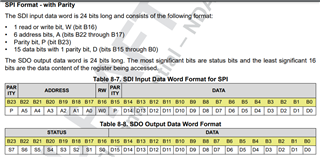
我暂时主要关注 SPI_READ 函数、我想如果可以的话、就能算出 SPI_WRITE
下面是我的尝试,它不起作用:
void Config_evm_spi(void)
{
//Pin Config
EALLOW;
// SPI_MOSI
GPIO_SetupPinOptions(16, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
// SPI_MISO
GPIO_SetupPinOptions(17, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
// SPI_CS
GPIO_SetupPinOptions(56, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
// SPI_CLK
GPIO_SetupPinOptions(57, GPIO_INPUT, GPIO_ASYNC | GPIO_PULLUP);
GPIO_SetupPinMux(16, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(17, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(56, GPIO_MUX_CPU1, 1);
GPIO_SetupPinMux(57, GPIO_MUX_CPU1, 1);
EDIS;
EALLOW;
ClkCfgRegs.LOSPCP.all = 0;
EDIS;
// Initialize SPI FIFO registers
SpiaRegs.SPIFFTX.all = 0xE040;
SpiaRegs.SPIFFRX.all = 0x2044;
SpiaRegs.SPIFFCT.all = 0x0;
//SPI Settings
SpiaRegs.SPICCR.bit.SPISWRESET = 0; //SPI Reset On
SpiaRegs.SPICCR.bit.CLKPOLARITY = 0; //SCLK Active High
SpiaRegs.SPICCR.bit.SPICHAR = 0xF; //16-bit SPI char
SpiaRegs.SPICCR.bit.SPILBK = 0;
SpiaRegs.SPICTL.bit.OVERRUNINTENA = 0; //No overrun interrupt
SpiaRegs.SPICTL.bit.CLK_PHASE = 0; //Phase 0
SpiaRegs.SPICTL.bit.MASTER_SLAVE = 1; //Master mode
SpiaRegs.SPICTL.bit.TALK = 1; //nSCS enabled
SpiaRegs.SPICTL.bit.SPIINTENA = 0; //TX/RX Interrupt Disabled
SpiaRegs.SPIBRR.bit.SPI_BIT_RATE = ((25000000 / 1000000) - 1); //Set baud rate to 1MHz
SpiaRegs.SPIPRI.bit.FREE = 1; //Set so breakpoints don't disturb transmission
SpiaRegs.SPICCR.bit.SPISWRESET = 1; //Exit SPI reset
}
Uint32 tspi_xmit(Uint32 spiFrame)
{
SpiaRegs.SPITXBUF = spiFrame;
//Wait for RX flag to indicate SPI frame completion
while(SpiaRegs.SPIFFRX.bit.RXFFST != 1)
{
}
return SpiaRegs.SPIRXBUF;
}
Uint32 tspi_read(Uint16 id, Uint16 addr)
{
Uint32 commandword = 0;
Uint16 data = 0; // No data to read
Uint16 p_addr = addr & 0x3F; // Ensure address is 6 bits (0-63)
// Construct the command word
commandword = (data & 0x7FFF) | (1 << 16) | (p_addr << 17); // 1 for read
// Calculate even parity for bits 0-15 and bits 16-23
Uint16 parity0 = 0, parity1 = 0;
int i;
for (i = 0; i < 16; i++) {
parity0 ^= (commandword >> i) & 1;
}
for (i = 16; i < 24; i++) {
parity1 ^= (commandword >> i) & 1;
}
// Set the parity bits
commandword |= (parity0 << 15) | (parity1 << 23);
return tspi_xmit(commandword);
}
Uint32 tspi_write(Uint16 id, Uint16 addr, Uint16 data)
{
Uint32 commandword = 0;
Uint16 p_addr = addr & 0x3F; // Ensure address is 6 bits (0-63)
// Construct the command word
commandword = (data & 0x7FFF) | (0 << 16) | (p_addr << 17); // 0 for write
// Calculate even parity for bits 0-15 and bits 16-23
Uint16 parity0 = 0, parity1 = 0;
int i;
for (i = 0; i < 16; i++) {
parity0 ^= (commandword >> i) & 1;
}
for (i = 16; i < 24; i++) {
parity1 ^= (commandword >> i) & 1;
}
// Set the parity bits
commandword |= (parity0 << 15) | (parity1 << 23);
return tspi_xmit(commandword);
}
谢谢!
Yara