请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F280039C 主题中讨论的其他器件: BOOSTXL-3PHGANINV
工具与软件:
尊敬的 TI 支持团队:
我目前使用与 BOOSTXL-3PhGanInv 模块配合使用的 LAUNCHXL-F280039C 和4级通用电机控制实验室固件来控制电机。
在成功完成之前的所有级别后、我在4级运行电机时遇到了一些奇怪的情况。
我附上了一个图、其中包含数据日志和示波器波形的图形、以便更好地实现可视化。 这些图形是使用 motor_datalog_fp2.graphProp 从生成的<install_location>\solutions\universal_motorcontrol_lab\common\debug。
测量设置:
- 相电流(IA)在 BOOSTXL-3PhGanInv 的 IA 引脚上测量。
- 在 VA 引脚上测量相电压(VA)。
- 为简单起见、随附的图被构造为具有三列的表:
- 固件级别。
- Code Composer Studio (CCS)中的图。
- 相应的示波器波形。
测试设置:
- 无传感器快速和编码器方法均经过测试。
- PWM 频率:45kHz。
- 电机转速:100Hz。
user_mtr1.h为确保完整性、附加文件中包含了各种计时器、滤波器和电机参数的设置。

观察和问题:
-
4级非正弦电流:
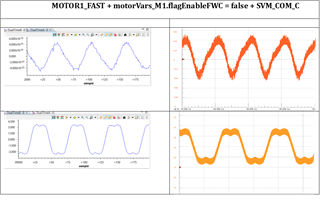
在3级(开环)中、电流波形完全是正弦波、如图1和图2所示。 但在4级、电机启动期间电流波形为正弦波形、但当电机达到设定速度时会失真(图3-6)。
为什么电流波形在4级失去了它们的正弦波形? -
FAST 与编码器的差异:
图3、4、5和6清楚地显示了 FAST 和编码器之间的电流波形差异。 例如、图4 (FAST)中显示的失真不同于图6 (编码器)中显示的失真。
什么可能导致 FAST 和编码器之间出现这种差异? -
相电压偏移:
比较图7、8中的相电压测量值(VA):- 图7 (ADC 测量)显示了明显的负失调电压。
- 图 8 (示波器测量)未显示此失调电压。
尽管执行了级别1中的偏移校正过程、该问题仍然存在。
什么可以解释 ADC 测量中的负失调电压?
非常感谢您有关这些问题的见解、有助于解决电流波形的失真问题。 如果需要更多信息、请告知我。
感谢您的支持!
Marco Lasagni