请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 工具/软件:Code Composer Studio
您好!
目前、我正在 使用工业工具箱4.1.0处理68xx ISK。 我的要求是获取人员的点云数据、我必须相应地映射到相关人员。
我已从实验中刷写预编译二进制映像、并运行 OOB_PARSER 以收集数据。
使用下面的解析器代码、我将把人员计数和云点数据转储到 txt 文件中。
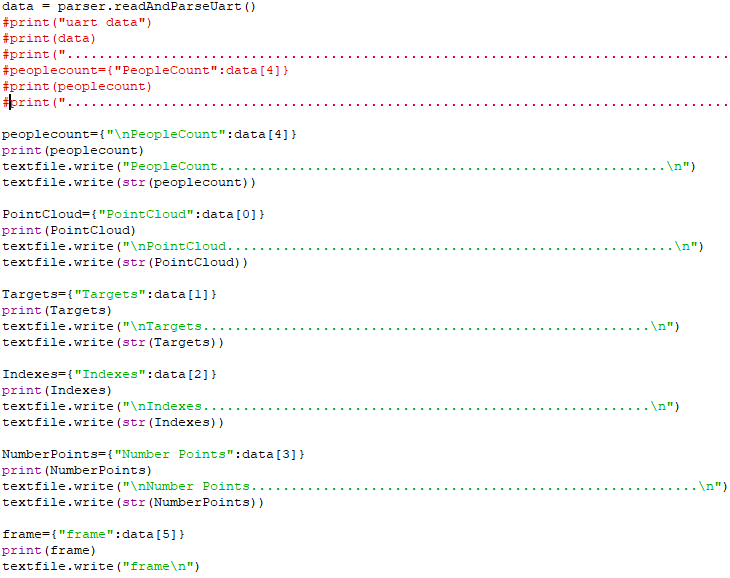
每次我得到 Point Cloud[5]数组时、即使人员计数 为0、1或2。 请参阅以下样片。
e2e.ti.com/.../PointCloudDump.zip
有时、我能够在 PointCloud 数组的两个索引中获得正确的值。 但不确定我必须采用哪个索引。
请在以下方面提供帮助?
1.如何使用点云索引映射人员索引。 人数{Y}= PointCloud[ x ]。 如何关联 X 和 Y
2.如何验证 PointCloud[Index]是否具有有效数据或垃圾数据。
3.如何从 PointCloud [索引]检索目标的高度。
4.为什么要获取 PointCloud [5]数组
期待您的回应。
此致、
Vivek