请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:ADC3424 在“线程”中讨论的其他部件:, THS4541, THS4509, LMH6554, TINA-TI
该ADC的数据表指出:
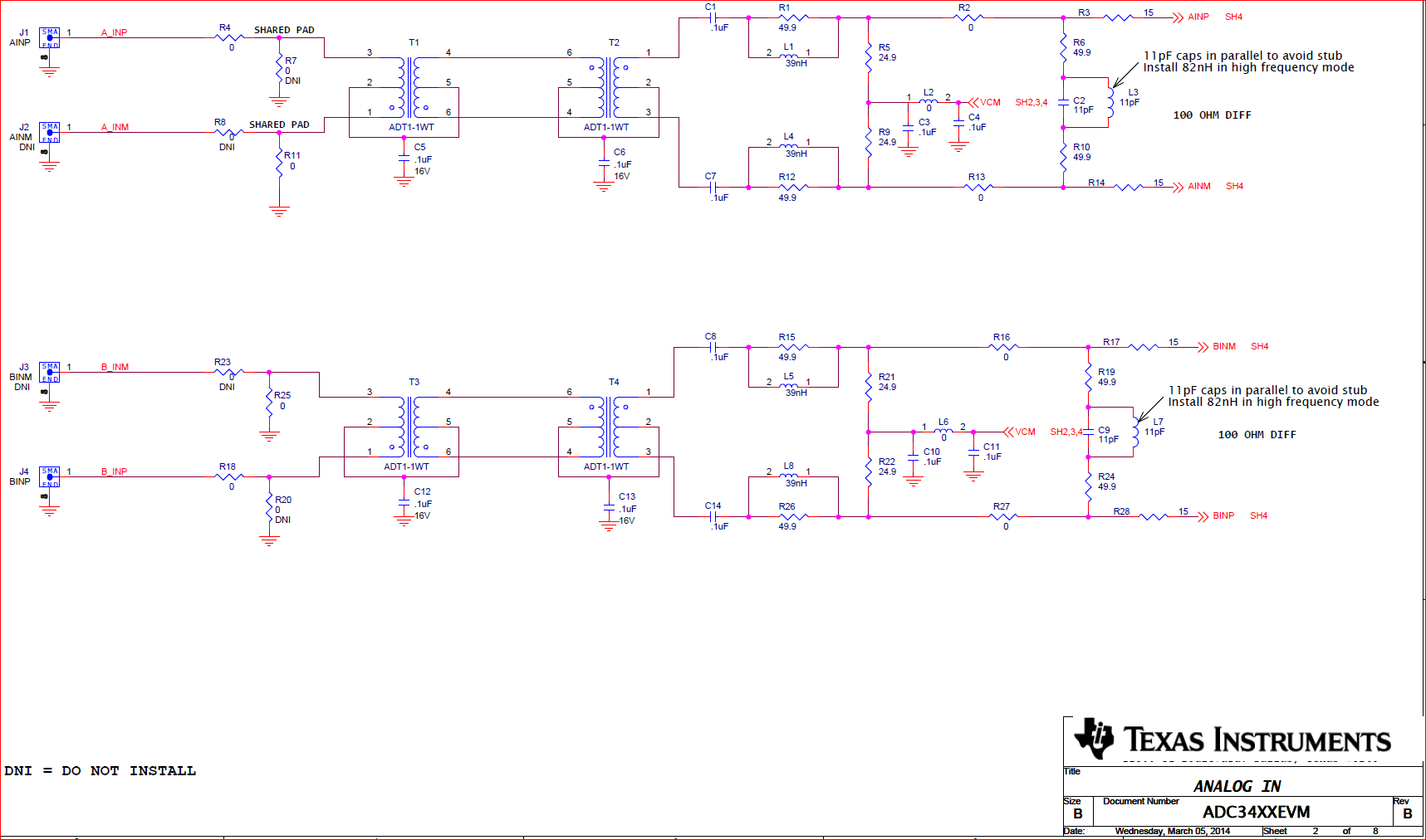
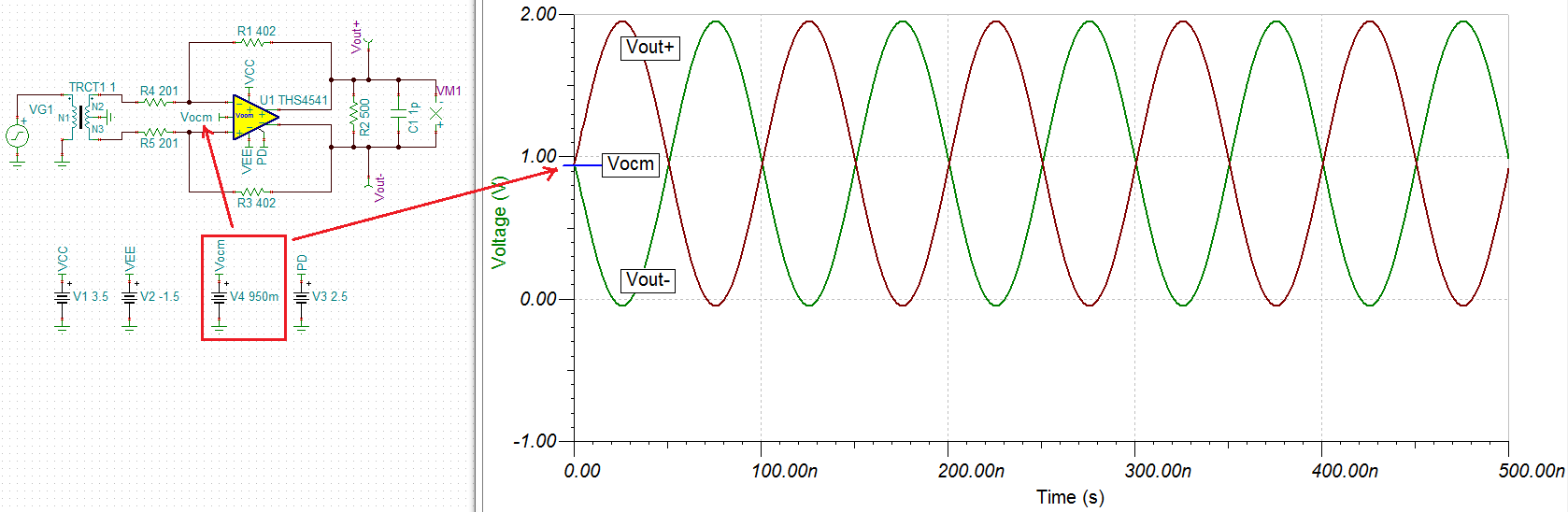
'每个输入引脚(INP,INM)必须在(VCM + 0.5 V)和(VCM–0.5 V)之间对称摆动,从而导致2-VPP (默认)差分输入摆动。'
老实说,我似乎找不到任何具有这些规格的ADC驱动器。 希望有一个3-4通道的TI IC与此ADC兼容。
感谢您的帮助。