请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8311 工具与软件:
您好!
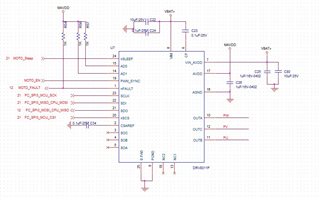
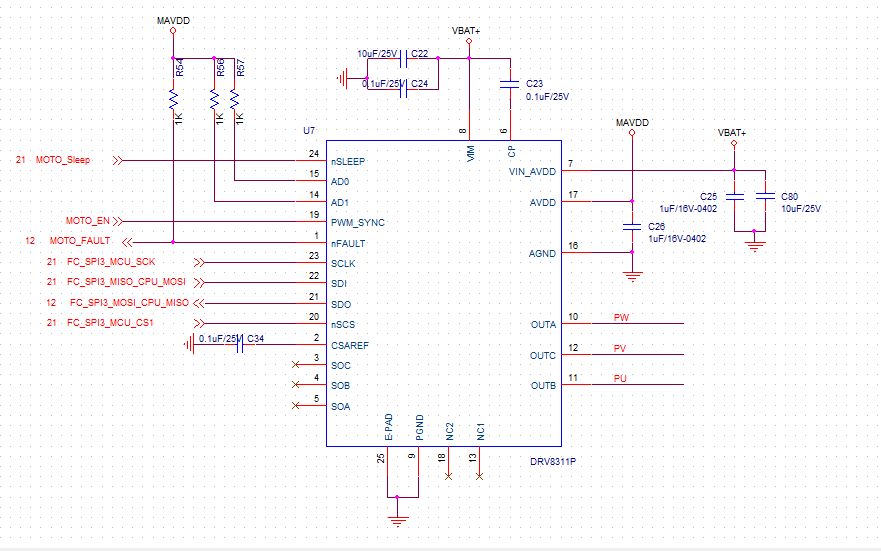
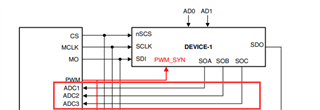
我们将 DRV8311用于无人机云台的 BLDC、请参阅下面的屏幕截图、我们想知道我们是否未将 SOA/SOB/SOC 连接到 MCU ADC、因为我们的 MCU 没有足够的 ADC 资源、
告知是否可用? BTW、如果我们可以考虑使用 SPI 读取寄存器以获取电路检测数据、谢谢。
Plesae 也回顾我们的 schematci 图,谢谢。