请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430I2040 主题中讨论的其他器件: EVM430-I2040S、 MSP430I2041
工具/软件:Code Composer Studio
您好!
对于 MSP430i2040 EVM、我已根据我们的应用成功更改了 UART 协议。
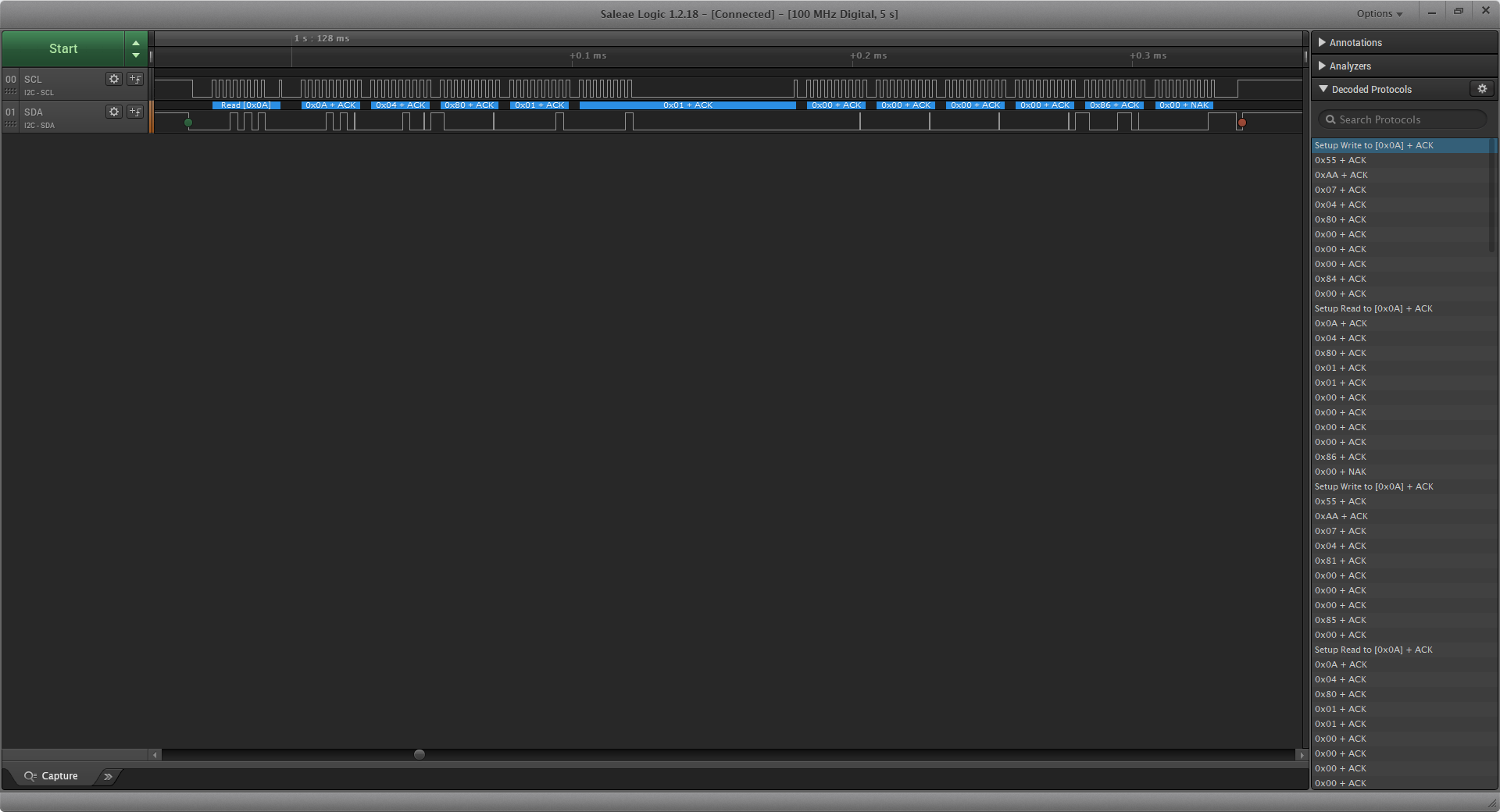
在另一个应用中、我希望使用 I2C 协议来获取计量数据。
它将如何与主器件通信?(我将 MSP430视为从器件)
它是基于请求的协议吗? 什么是获取数据的请求命令?
例如、 如果我想获得 Vrms、主器件应该向 MSp430i2040发送什么命令?
谢谢、
Anuradha。