Other Parts Discussed in Thread: MSP430G2553
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432P401R 主题中讨论的其他器件:MSP430G2553
大家好、
我的项目上遇到了问题、这是我的最后一篇论文。 在该项目中、我尝试通过 UART 上的蓝牙模块与 MSP432进行通信。 我将与大家分享我的发送器器件代码和接收器件代码、但首先、我想解释我所面临的问题;我正在尝试使用以下代码通过 MSP430发送一些测量数据。 MSP430 G2553正以发送器的形式正确发送数据。 如果接收器侧也是 MSP430 G2553、则可以正确获取从 UART 接收到的数据、但如果接收器侧是 MSP432、则无法正确获取数据。
以下代码是由 MSP430G2553运行的发送器部分;
#include char X_Axis; char Y_Axis; char Z_Axis; char Griper_Axis; char PreambLE_1 ='A'; char PreambLE_2 ='B'; char PreambLE_3 ='C'; void PIN_Config (void); void TIME_Config (void); void UART_Config (void); void ADC_Config (void); void ADC_Reading_X_Axis (void); void ADC_Reading_Y_Axis (void); void ADC_Reading_Z_Axis (void); void ADC_Reading_Griperm_Axis (void); void translation_to-MSP432 (void); void main (void) { WDTCTL = WDTPW | WDTHOLD; PIN_Config (); TIME_Config (); UART_Config (); ADC_Config (); while (1){ ADC_Reading_X_Axis (); ADC_Reading_Y_Axis (); ADC_Reading_Z_Axis (); ADC_Reading_Griper_Axis (); 正在发送_TO_MSP432(); } void PIN_Config (void){ P1SEL = BIT1 | BIT2; P1SEL2 = BIT1 | BIT2; P2DIR = 0xFF; P2OUT &=~0x00; } void time_Config (void){ DCOCTL = 0; BCSCTL1 = CALBC1_1MHz; DCOCTL = CALDCO_1MHz; } void UART_Config (void){ UCA0CTL1 |= UCSWRST | UCSSEL_2; UCA0BR0 = 8; UCA0BR1=0; UCA0MCTL = UCBRS_6; UCA0CTL1 &=~UCSWRST; } void ADC_Config (void){ ADC10CTL0 = SREF_0 | ADC10ON | ADC10SHT_3; } void ADC_Reading_X_Axis (void){ ADC10CTL0 &=~ENC; ADC10CTL1 = INCH_0 | CONSEQ_0 | ADC10SSEL_0; ADC10AE0 |= BIT0; ADC10CTL0 |= ENC | ADC10SC; while (ADC10CTL1 & ADC10BUSY); x_Axis =(ADC10MEM >> 7); } void ADC_Reading_Y_Axis (void){ ADC10CTL0 &=~ENC; ADC10CTL1 = INCH_3 | CONSEQ_0 | ADC10SSEL_0; ADC10AE0 |= BIT3; ADC10CTL0 |= ENC | ADC10SC; while (ADC10CTL1 & ADC10BUSY); Y_Axis =(ADC10MEM >> 7); } void ADC_Reading_Z_Axis (void){ ADC10CTL0 &=~ENC; ADC10CTL1 = INCH_4 | CONSEQ_0 | ADC10SSEL_0; ADC10AE0 |= BIT4; ADC10CTL0 |= ENC | ADC10SC; while (ADC10CTL1 & ADC10BUSY); Z_Axis =(ADC10MEM >> 7); } void ADC_Reading_Griper_Axis (void){ ADC10CTL0 &=~ENC; ADC10CTL1 = INCH_5 | CONSEQ_0 | ADC10SSEL_0; ADC10AE0 |= BIT5; ADC10CTL0 |= ENC | ADC10SC; while (ADC10CTL1 & ADC10BUSY); 夹具轴=(ADC10MEM >> 7); } void translation_TO_MSP432 (void){ UCA0TXBUF =前导码_1; while (!(IFG2 & UCA0TXIFG)); UCA0TXBUF =前导码_2; while (!(IFG2 & UCA0TXIFG)); UCA0TXBUF =前导码_3; while (!(IFG2 & UCA0TXIFG)); UCA0TXBUF = X_Axis; while (!(IFG2 & UCA0TXIFG)); UCA0TXBUF = Y_Axis; while (!(IFG2 & UCA0TXIFG)); UCA0TXBUF = Z_轴; while (!(IFG2 & UCA0TXIFG)); UCA0TXBUF = Griper_Axis; while (!(IFG2 & UCA0TXIFG)); }
以下代码是 MSP430G2553选择 MSP430G2553作为接收器端时运行的接收器部分;
#include int i = 0; char X_Axis; char Y_Axis; char Z_Axis; char Griper_Axis; char 前导码_1 = 0x41;char 前导码_2 = 0x42; char 前导码_3 = 0x43; void PIN_Config (void); void time_Config (void); void UART_Config (void); void main (void) { WDTCTL = WDTPW | WDTHOLD; PIN_Config(); TIME_Config(); UART_Config(); enable_interrupts (); LPM0; } void PIN_Config (void){ P1SEL = BIT1 | BIT2; P1SEL2 = BIT1 | BIT2; P1DIR = 0xF9; P2DIR = 0xFF; P1OUT = 0x00; P2OUT = 0x00; } void time_Config (void){ DCOCTL = 0; BCSCTL1 = CALBC1_1MHz; DCOCTL = CALDCO_1MHz; } void UART_Config (void){ UCA0CTL1 |= UCSWRST | UCSSEL_2; UCA0BR0 = 8; UCA0BR1=0; UCA0MCTL = UCBRS_6; UCA0CTL1 &=~UCSWRST; IE2 |= UCA0RXIE; } #pragma vector = USCIAB0RX_vector __interrupt void USCIAB0RX_ISR (void){ if (i = 0){ IF (UCA0RXBUF =前导码_1) I = 1; 其他 I = 0; } 否则、如果(i = 1){ IF (UCA0RXBUF =前导码_2) I = 2; 其他 I = 0; } 否则、如果(i ==2){ IF (UCA0RXBUF =前导码_3) I = 3; 其他 I = 0; } 否则、如果(i = 3){ x_Axis = UCA0RXBUF; I = 4; } 否则、如果(i = 4){ Y_Axis = UCA0RXBUF; I = 5; } 否则、如果(i == 5){ Z_Axis = UCA0RXBUF; I = 6; } 否则、如果(i ==6){ 夹具轴= UCA0RXBUF; I = 0; } }
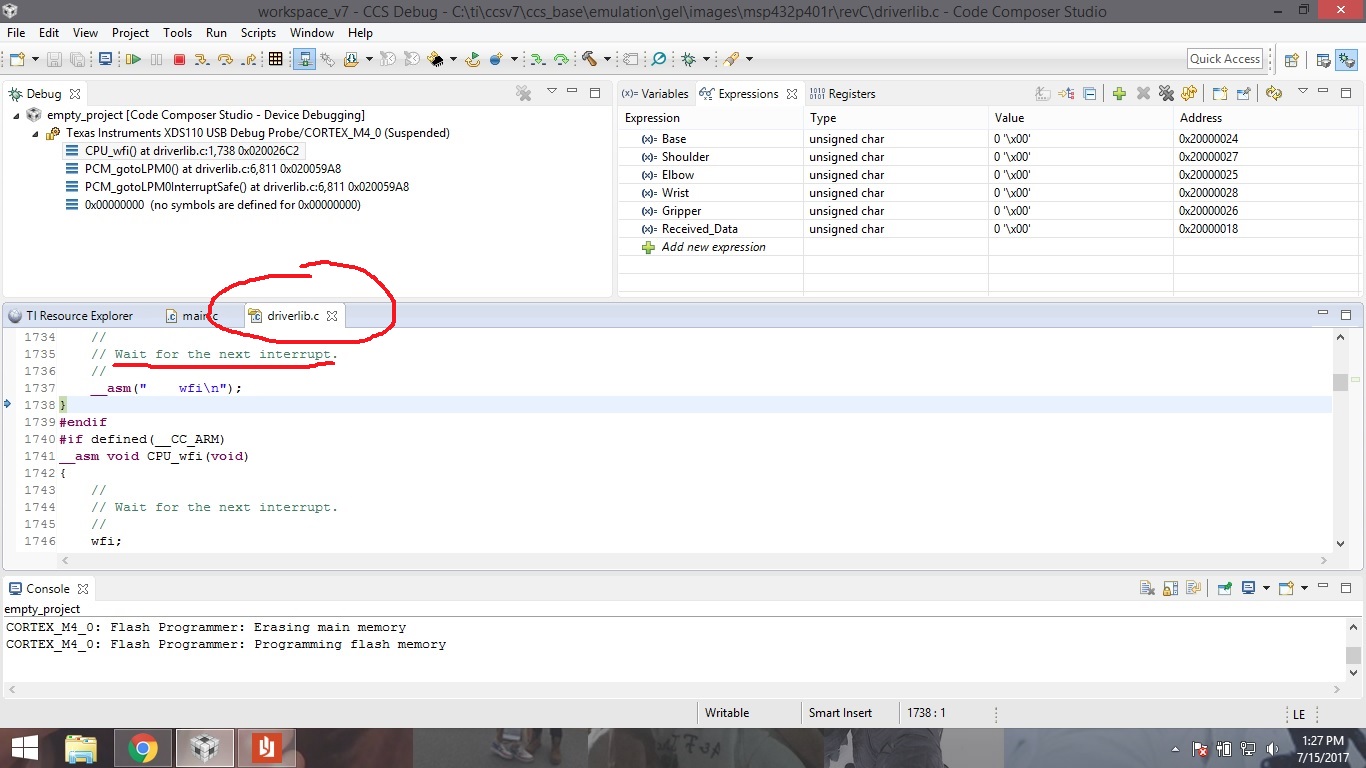
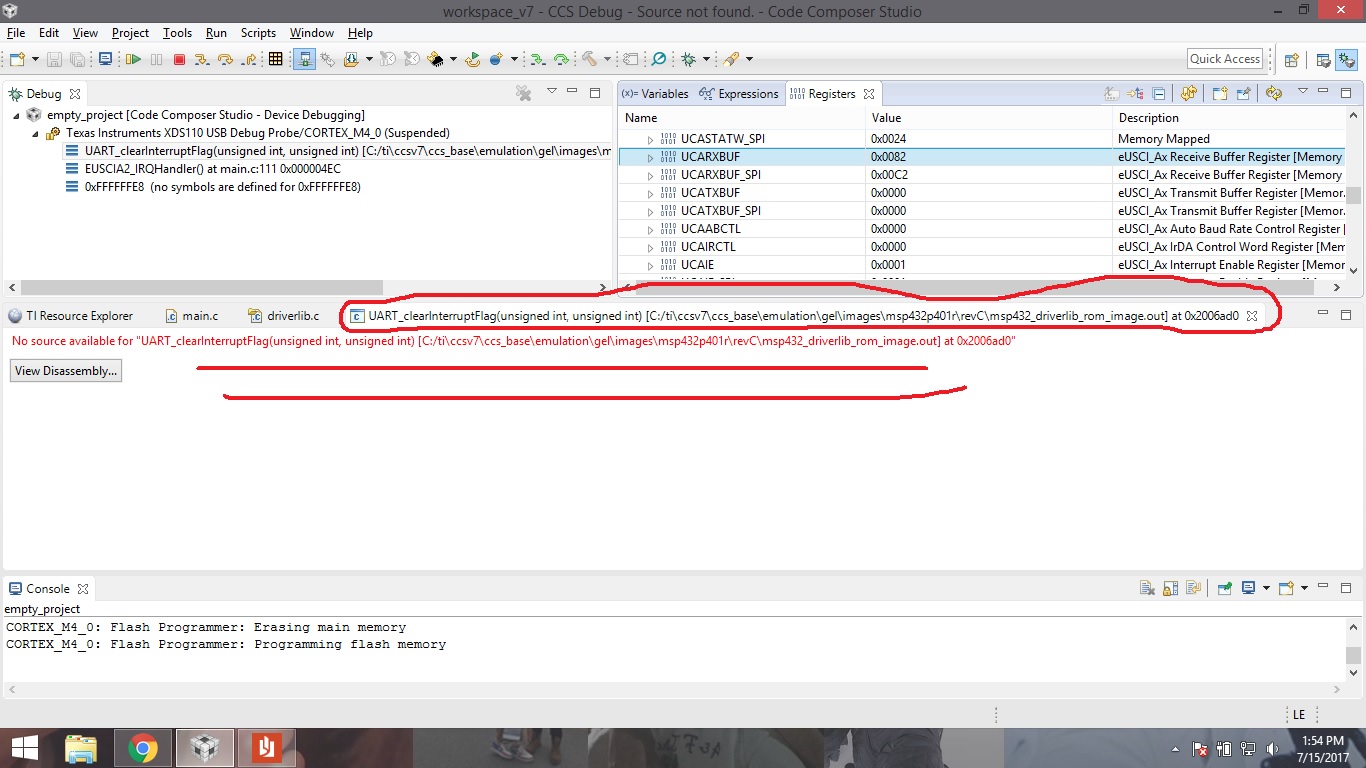
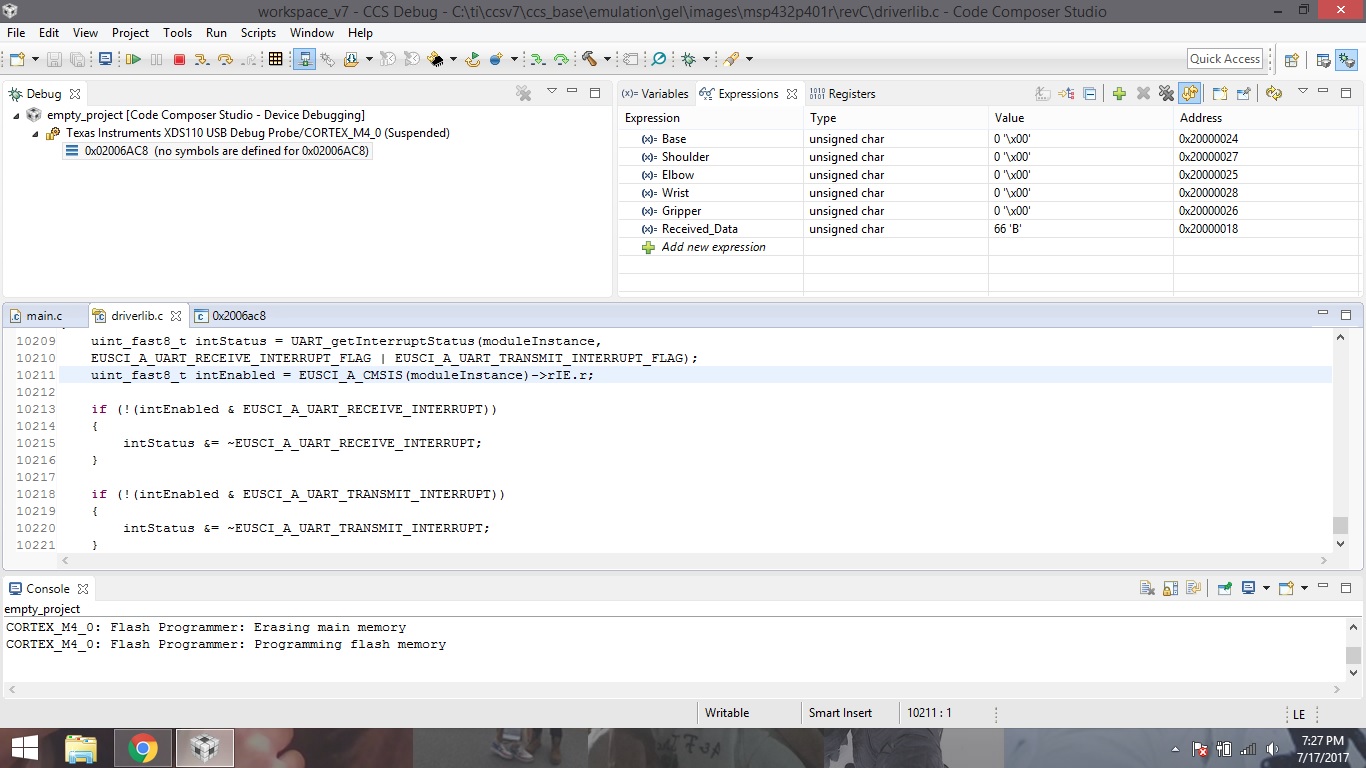
如果选择 MSP432作为接收器端、则 belowcode 是由 MSP432运行的接收器部分;
#include "driverlib.h" #include #include int i = 0; char X_Axis; char Y_Axis; char Z_Axis; char Griper_Axis; 字符前导码_1 ='A'; 字符前导码_2 ='B'; 字符前导码_3 ='C'; 字符接收到的数据= 0x00; const eUSCI_UART_Config uartConfig = { EUSCI_A_UART_CLOCKSOURCE_SMCLK、 // SMCLK 时钟源 1、 // BRDIV = 8 10、 // UCxBRF =- 0、 // UCxBRS = 0xD6 EUSCI_A_UART_NO_奇 偶校验、 //无奇偶校验 EUSCI_A_UART_MSB_FIRST、 // MSB 优先 EUSCI_A_UART_One_stop_bit、 //一个停止位 EUSCI_A_UART_MODE、 // UART 模式 EUSCI_A_UART_oversampling_BAUDRATE_generation、//无过采样 }; int main (void) { WDT_A_HOLDTimer(); /*在 UART 模式下选择 P1.2和 P1.3 */ GPIO_setPeripheralModuleFunctionInputPin (GPIO_PORT_P3、GPIO_PIN2 | GPIO_PIN3、GPIO_PRIMARY_MODULE_Function); CS_setDCOFrequency (1000000); UART_initModule (EUSCI_A2_base、uartConfig); /*配置 UART 模块*/ UART_enableModule (USCI_A2_base); /*启用 UART 模块*/ UART_enableInterrupt (EUSCI_A2_base、EUSCI_A_UART_receive_interrupt);//启用中断* INTERRUPT_enableInterrupt (INT_EUSCIA2); interrupt_enableMaster(); interrupt_enableSlepOnIsrExit(); while (1) { PCM_gotoLPM0 (); } } 空 EUSCIA2_IRQHandler (空) { uint32_t status = UART_getEnabledInterruptStatus (EUSCI_A2_base); UART_clearInterruptFlag (EUSCI_A2_base、status); IF (STATUS 和 EUSCI_A_UART_receive_interrupt_FLAG) { Received_Data = UART_receiveData (EUSCI_A2_base); if (i = 0){ if (Received_Data =前导码_1) I = 1; 其他 I = 0; } 否则、如果(i = 1){ if (Received_Data =前导码_2) I = 2; 其他 I = 0; } 否则、如果(i ==2){ if (Received_Data =前导码_3) I = 3; 其他 I = 0; } 否则、如果(i = 3){ x_Axis =接收到的数据; I = 4; } 否则、如果(i = 4){ Y_Axis =接收到的数据; I = 5; } 否则、如果(i == 5){ Z_Axis =接收到的数据; I = 6; } 否则、如果(i ==6){ 夹具轴=接收到的数据; I = 0; } } interrupt_disableSlepOnIsrExit(); }