Other Parts Discussed in Thread: UCC27614, UCC27624, UCC57108
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UCC27614主题: UCC27624、 UCC57108 中讨论的其他器件
工具/软件:
您好、
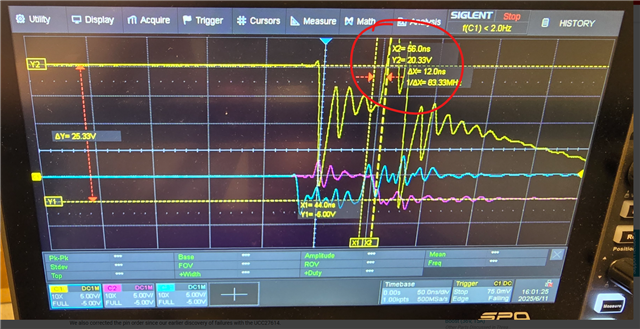
跟进本论坛上的讨论—我们最初认为我们已经找到了解决此问题的解决方法。 然而、我们现在观察到、在开关事件期间 在~1000V 下 2000a 、我们的当前设计偶尔会在栅极驱动器的输入信号上触发短暂的毛刺脉冲。 这种干扰可能发生在前面讨论的同一关键时序窗口内、似乎会对驱动器造成永久损坏。 失效模式与我们之前看到的相同:OUT 引脚没有短路、但驱动器会停止工作、就好像某些内部逻辑或电平转换器受到影响一样。
您能否确认此问题是否已在即将到来的批次中得到解决? 如果没有、我们可能需要探讨其他解决办法、并欢迎提出任何建议。
提前感谢。