

Other Parts Discussed in Thread: LM5104
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:LM5104 我在LM5104附近设计了一个电流调节器,打算在500kHz (周期= 2us)左右工作。
我知道会有一些最小的功能占空比,这取决于切换频率和各种延迟,但我发现的限制让我想知道人们如何使用这种或类似的栅极驱动器来设计电路,这些驱动器的工作频率为1MHz或更高。
我将LM5104 SPICE模型导入到LTSPICE中,它与我的实际测量结果相当匹配:
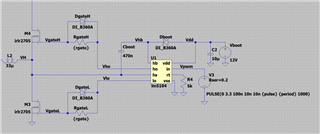
假设我的电阻约为10欧姆,电阻约为10欧姆或更低,并且我的半桥电源电压为36V。
我已将RDT电阻器降低到数据表中建议的最低值5k。
PWM输入的周期= 2us (500kHz操作)。
让我们在几个占空比运行SIM,了解传播延迟和有效占空比的不同之处:
50 % 占空比(1us准时)。
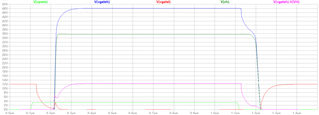
Vpwm输入(绿色),LO栅极驱动输出(红色),HO栅极驱动输出(蓝色),VH半桥电压(绿色)和高侧FET栅极源电压(品红色)。
现在,让我们在25 % 上运行它(0.5 us准时)
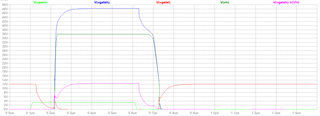
和10 % (0.2us On Time)(放大水平时间刻度):
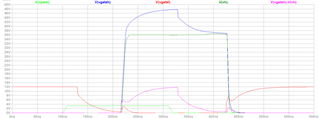
现在,让我们比较一些正时参数和占空比误差:
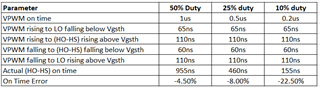
这是有道理的,在固定传播延迟下,低占空比最终会变得非常不准确,尤其是在较高频率下。
我预计需要将控制回路限制在某些范围内运行,现在我假设我将使用10 90 % 左右(在上部受制于需要为启动电容器充电)。
我的问题是:设计人员如何使用这些类型的栅极驱动器来制造1MHz和更高的开关调节器? TI和其他供应商的同类器件的某些参数的传播延迟都在数十至数百纳秒之间。
是否只是假设您将控制环路绑定到较小的允许操作范围(例如30 70 %),然后您的控制环路将根据需要在该空间内移动以调节输出?
