请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP2951 大家好、
我的一位客户正在考虑将 LP2951用于他们的下一个产品。
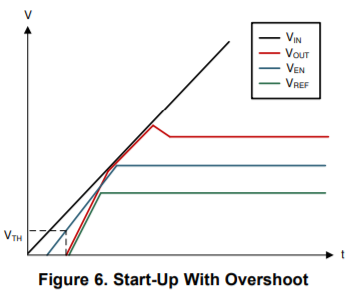
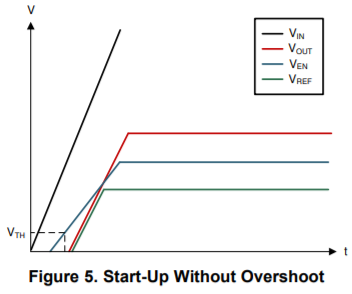
当 VIN 在 后续线程上加电时、他们知道 LP2951输出电压过冲。
https://e2e.ti.com/support/power-management/f/196/t/819132
但该线程中的 VIN 上升时间速度非常快。
在客户案例中、VIN 上升时间将为500us ~ 5ms 范围。
输出过冲是否在上升时间范围内发生?
非常感谢您的答复。
此致、
Kazuya。