

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BQ77915 主题中讨论的其他器件: INA302、 LM5050-2、 BQ76925、 BQ76930
您好!
我来自佛罗里达大学。 我有一个机器人、它有8个推进器、一台计算机以及多个传感器、摄像头和其他小型传动器。 我们一直使用由两个串联的6S LiPos 组成的48V 电压轨运行。 我们将更换推进器、因此我们将切换到24V 电压轨、并将两节电池串联并并联运行。 我们将借此机会最终添加电池保护功能。 这是一个我没有太多经验的地方,所以我在寻找建议。
我所想象的总体拓扑结构如下所示:
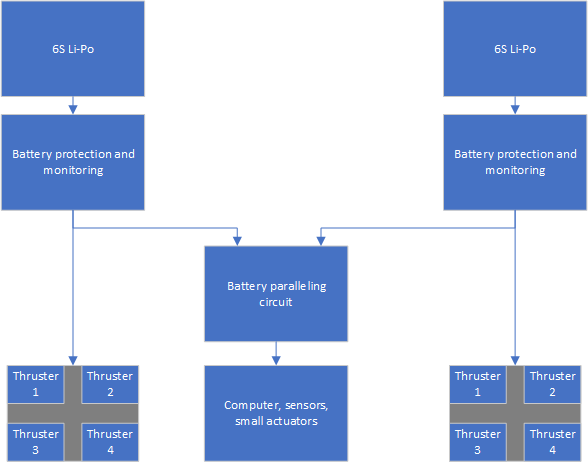
我要防范的最大问题是电池过度放电或电压过低。 至少对于此初始版本、我们将继续取出电池并将其放在专用充电器上。 该电路只需防止放电事件。 OT 和 OC 保护很好。 我们还希望能够监控电池电压和电流。
这是我根据我在 TI 网站上找到的信息所想的:
电池保护:
BQ77915看起来像一个能够满足甚至超出我们需求的芯片、但我们必须使用两个芯片、因为我们的电池为6S、并并联多个 FET、因为我们在24V 标称电压下的最大功耗为每节电池1200W。
或者、我认为我们可能必须实施一种解决方案、在该解决方案中、我们使用 uC 监控电池电压、然后在电池电量过低时切断电源。 我们在每个推进器上都有一个用于"终止"功能的继电器、我们可以向计算机/传感器电源添加一个继电器。 这里的好处是我们不必进行 FET 并联、但缺点是需要设计和测试电路。
电池监控:
我们有一个单独的电路来实现这一目的、我们在实验中的其他车辆上使用了该电路。 它基于 INA302
电池并联:
我们以前使用过 LM5050-2来实现这一目的、我们计划在该车辆上继续使用芯片。
