请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UCC27211 工具与软件:
大家好、团队成员:
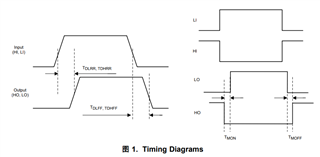
关于 UCC27211 时序图、已知 UCC27211不具有互锁功能、因此如果 HI LI 输入高电平、HO 和 LO 将同时输出。
但下图 清楚地说明了 TDLRR 参数是输入和输出之间的间隔时间。
) 、μ s 和延迟匹配在这里有点混乱、如果 HI (LOW)+LI (HIGH)输入一起、为什么 HO 将首先下降、而 LO 将需要类型2ns 来上升?μ s 为什么 LO 不能首先上升、而 HO 在2ns 后下降
2 μ s)UCC27211没有互锁功能、HO 和 LO 可以同时输出、为什么我们在这里仍然需要延迟匹配来防止短路?
请点击此处查看。