请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843AOPEVM 主题中讨论的其他器件: UNIFLASH、AWR1843、 AWR1843AOP、AWR1843BOOST
工具/软件:
我目前使用 AWR1843AOPEVM 雷达传感器、并遵循汽车 MRR 用户指南。 我已成功刷写 位于的 xwr18xx_mrr_demo.bin 文件
C:\ti\radar_toolbox_2_20_00_05\source\ti\examples\adas\medium_range_radar\
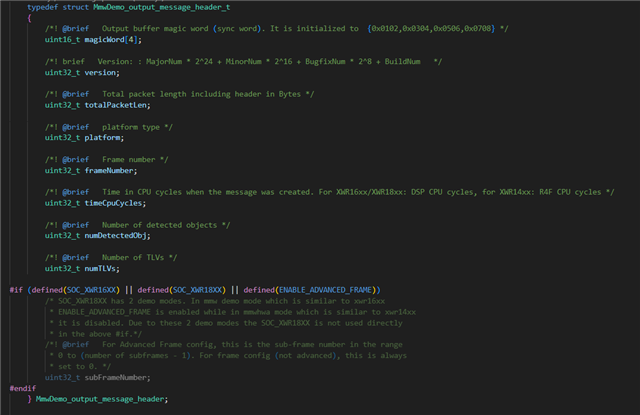
在文件"MRR_CONFIG_CONSTS.h"中、有启用模式的代码行

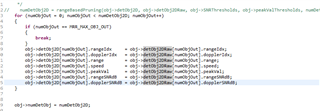
我正在分析该mrr_config_consts.h文件、想了解启用不同雷达模式对数据包数据的影响。
如果我取消注释#define SUBFRAME_CONF_MRR_USRR、启用多模式操作(MRR 后跟 USRR20)、数据包中将包括哪种类型的数据?
同样、如果我仅取消注释#define SUBFRAME_CONF_MRR(MRR80模式)、本例中数据包数据的结构和内容将是什么?
您能否澄清 两种配置中的差异和数据类型?
期待您的见解。
以下是我使用的设置:
CCS 版本:12.8
SDK 版本:3.6
雷达模块:AWR1843AOPEVM
UniFlash 版本:8.8