

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1513676/iwrl6432-sensor
器件型号:IWRL6432工具/软件:
在"radar_toolbox_3_00_00_05/source/ti/examples/Industrial_and_TLV/TLV/docs/TLV.html Personal_Electronics "中 Bike_Radar_User_Guide、它最后提到我们应该获得2个 ID 为1035和1034的 Bike_Radar
因为我们对速度感兴趣。 似乎 ID 为1034的 TLV 提供了正确的信息。
如您所知、我们已将 ApplicationVisualizer 代码移植到 MCU (到 C++)上运行。
但问题是 TLV 类型是301和1034。
我移植了处理这2个数据包的 python 函数。
因此、根据文档、1034具有速度信息。 但雷达工具箱可视化工具中的 python 代码与该描述/实现不匹配。
在 python 代码1034 TLV ha 上、
1)帧间时间
2)传输时间
3)电源相关数据
4)温度相关数据
5)自我速度
6)α 角
但在文档中、1034 TLV 本应具有
1) TrackID
2) X、Y 位置
3) X、Y 速度
4)其他一些值 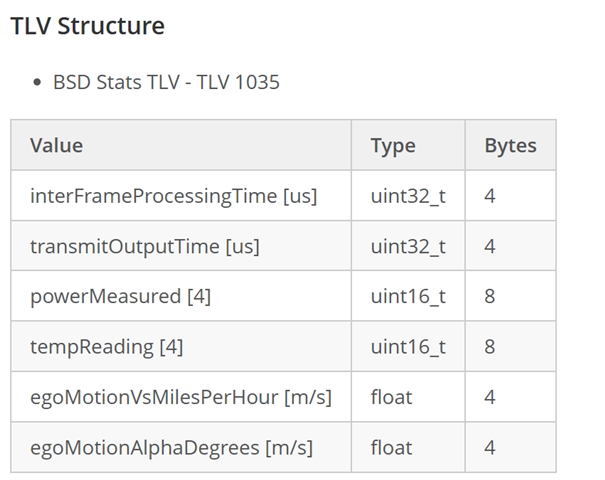





南 文档是否过时? 因为文档中的1034 TLV 与 python 代码中的1034不匹配? 或者我们理解这是错误的吗?
我的主要要求是获取与 TI 所看到点相关的速度数据。
谢谢。

