请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843AOPEVM 工具/软件:
大家好、我目前有带 ROS2 驱动器的 6843AOPEVM 模块。
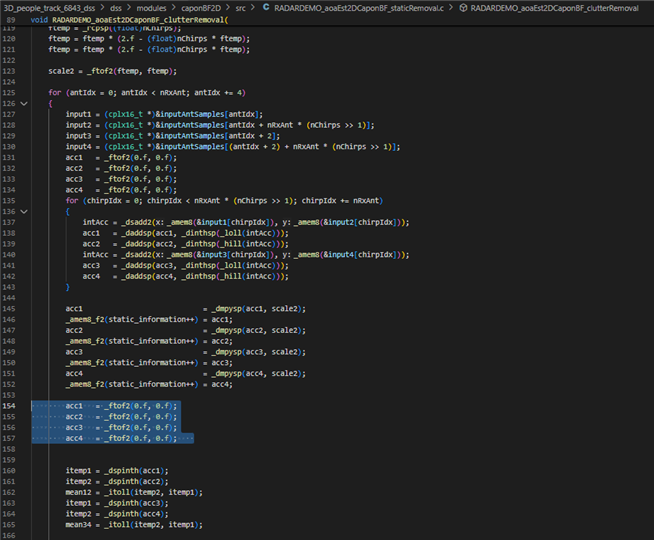
目前、ROS2 驱动程序仅支持 Out_the_box_demo 和 3D_people_tracking。 使用这些二进制文件、我无法检测角反射器等静态物体。 是否有办法调整配置参数以检测静态物体?
PS:我已经切换了杂波消除、但无法检测到角反射器。